 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTodyNet: Temporal Dynamic Graph Neural Network for Multivariate Time Series Classification
Apr 11, 2023Multivariate time series classification (MTSC) is an important data mining task, which can be effectively solved by popular deep learning technology. Unfortunately, the existing deep learning-based methods neglect the hidden dependencies in different dimensions and also rarely consider the unique dynamic features of time series, which lack sufficient feature extraction capability to obtain satisfactory classification accuracy. To address this problem, we propose a novel temporal dynamic graph neural network (TodyNet) that can extract hidden spatio-temporal dependencies without undefined graph structure. It enables information flow among isolated but implicit interdependent variables and captures the associations between different time slots by dynamic graph mechanism, which further improves the classification performance of the model. Meanwhile, the hierarchical representations of graphs cannot be learned due to the limitation of GNNs. Thus, we also design a temporal graph pooling layer to obtain a global graph-level representation for graph learning with learnable temporal parameters. The dynamic graph, graph information propagation, and temporal convolution are jointly learned in an end-to-end framework. The experiments on 26 UEA benchmark datasets illustrate that the proposed TodyNet outperforms existing deep learning-based methods in the MTSC tasks.
OmniWheg: An Omnidirectional Wheel-Leg Transformable Robot
Mar 04, 2022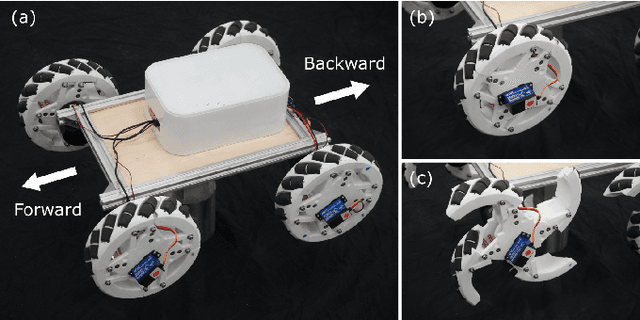
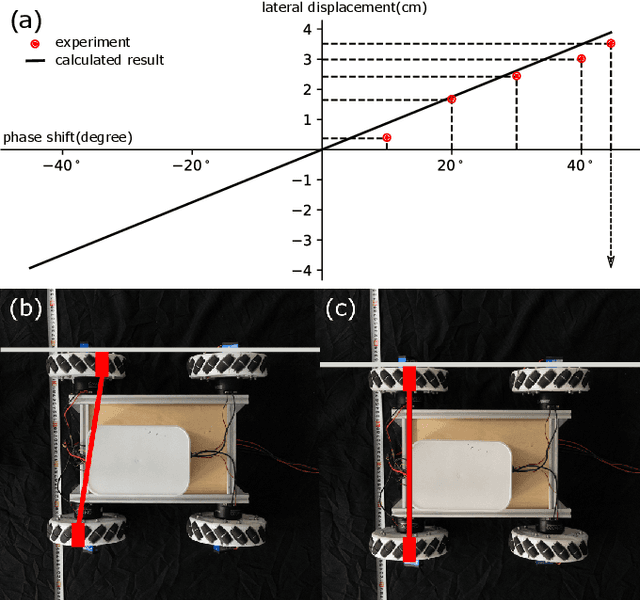
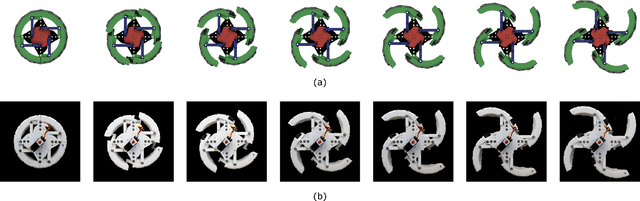
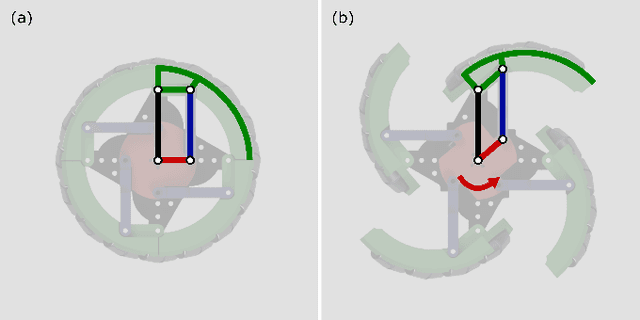
This paper presents the design, analysis, and performance evaluation of an omnidirectional transformable wheel-leg robot called OmniWheg. We design a novel mechanism consisting of a separable Omni-wheel and 4-bar linkages, allowing the robot to transform between Omni-wheeled and legged modes smoothly. On wheeled mode, the robot can move in all directions and efficiently adjust the relative position of its wheels, while it can overcome common obstacles in legged mode, such as stairs and steps. Unlike other articles studying whegs, this implementation with omnidirectional wheels allows the correction of misalignments between right and left wheels before traversing obstacles, which effectively improves the success rate and simplifies the preparation process before the wheel-leg transformation. We describe the design concept, mechanism, and the dynamic characteristic of the wheel-leg structure. We then evaluate its performance in various scenarios, including passing obstacles, climbing steps of different heights, and turning/moving omnidirectionally. Our results confirm that this mobile platform can overcome common indoor obstacles and move flexibly on the flat ground with the new transformable wheel-leg mechanism, while keeping a high degree of stability.
Wider Channel Attention Network for Remote Sensing Image Super-resolution
Jan 02, 2019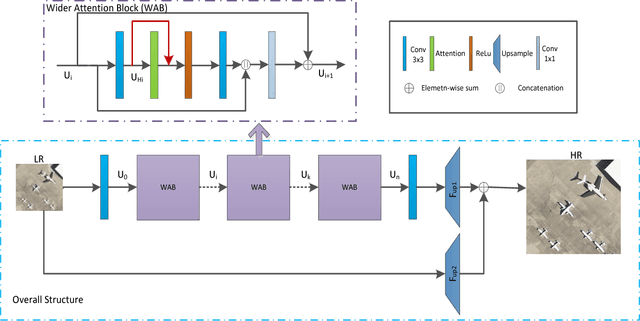

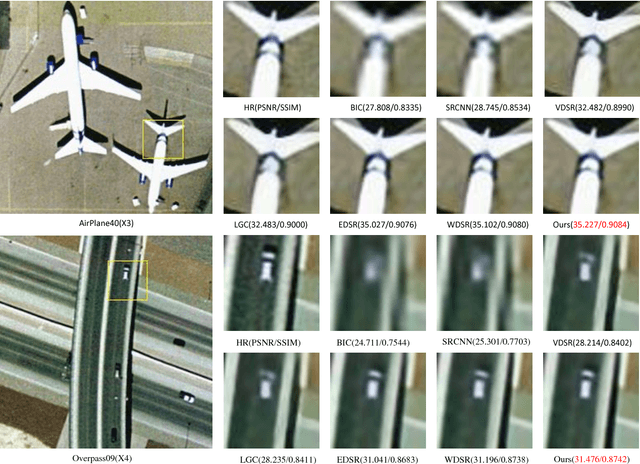

Recently, deep convolutional neural networks (CNNs) have obtained promising results in image processing tasks including super-resolution (SR). However, most CNN-based SR methods treat low-resolution (LR) inputs and features equally across channels, rarely notice the loss of information flow caused by the activation function and fail to leverage the representation ability of CNNs. In this letter, we propose a novel single-image super-resolution (SISR) algorithm named Wider Channel Attention Network (WCAN) for remote sensing images. Firstly, the channel attention mechanism is used to adaptively recalibrate the importance of each channel at the middle of the wider attention block (WAB). Secondly, we propose the Local Memory Connection (LMC) to enhance the information flow. Finally, the features within each WAB are fused to take advantage of the network's representation capability and further improve information and gradient flow. Analytic experiments on a public remote sensing data set (UC Merced) show that our WCAN achieves better accuracy and visual improvements against most state-of-the-art methods.