 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Image Deblurring with Dynamic Motion Awareness
Aug 24, 2022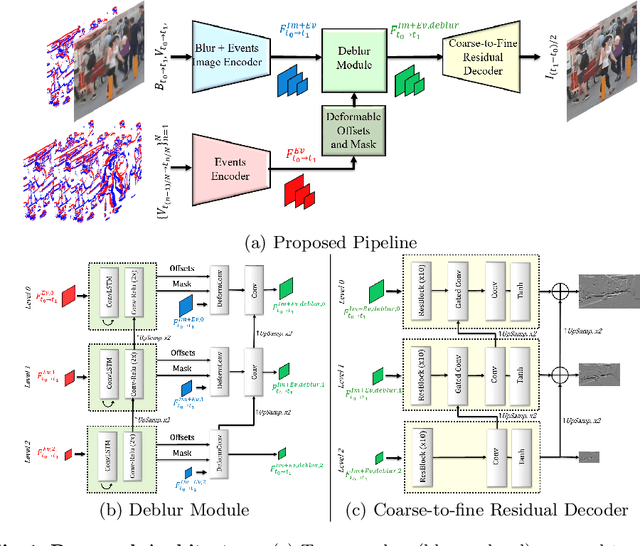
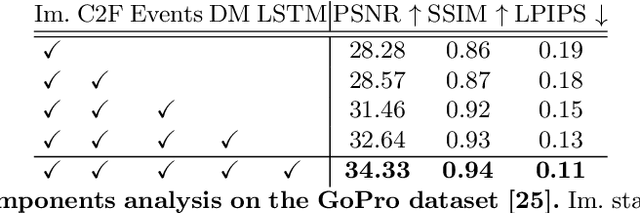
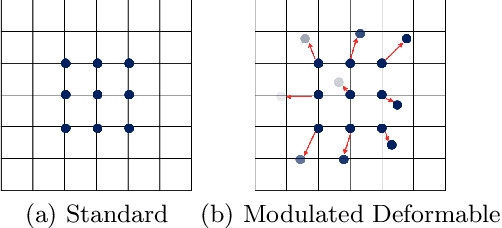
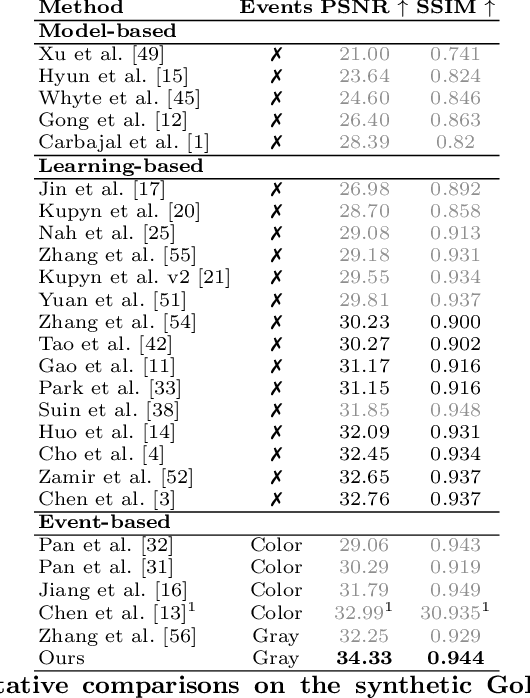
Non-uniform image deblurring is a challenging task due to the lack of temporal and textural information in the blurry image itself. Complementary information from auxiliary sensors such event sensors are being explored to address these limitations. The latter can record changes in a logarithmic intensity asynchronously, called events, with high temporal resolution and high dynamic range. Current event-based deblurring methods combine the blurry image with events to jointly estimate per-pixel motion and the deblur operator. In this paper, we argue that a divide-and-conquer approach is more suitable for this task. To this end, we propose to use modulated deformable convolutions, whose kernel offsets and modulation masks are dynamically estimated from events to encode the motion in the scene, while the deblur operator is learned from the combination of blurry image and corresponding events. Furthermore, we employ a coarse-to-fine multi-scale reconstruction approach to cope with the inherent sparsity of events in low contrast regions. Importantly, we introduce the first dataset containing pairs of real RGB blur images and related events during the exposure time. Our results show better overall robustness when using events, with improvements in PSNR by up to 1.57dB on synthetic data and 1.08 dB on real event data.
Multi-Bracket High Dynamic Range Imaging with Event Cameras
Mar 13, 2022



Modern high dynamic range (HDR) imaging pipelines align and fuse multiple low dynamic range (LDR) images captured at different exposure times. While these methods work well in static scenes, dynamic scenes remain a challenge since the LDR images still suffer from saturation and noise. In such scenarios, event cameras would be a valid complement, thanks to their higher temporal resolution and dynamic range. In this paper, we propose the first multi-bracket HDR pipeline combining a standard camera with an event camera. Our results show better overall robustness when using events, with improvements in PSNR by up to 5dB on synthetic data and up to 0.7dB on real-world data. We also introduce a new dataset containing bracketed LDR images with aligned events and HDR ground truth.
TimeLens: Event-based Video Frame Interpolation
Jun 14, 2021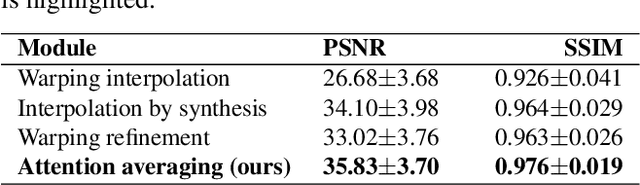
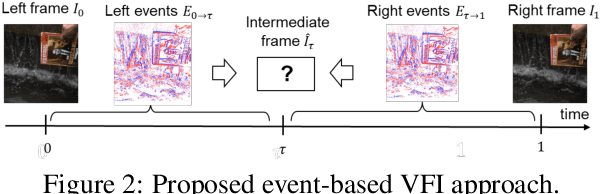
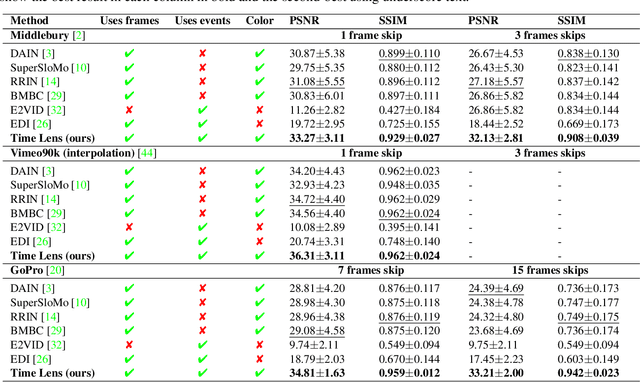
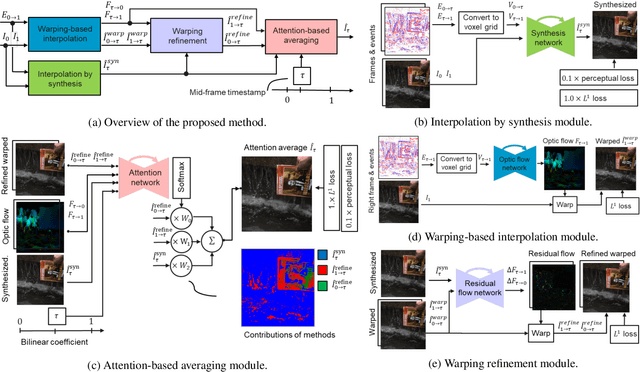
State-of-the-art frame interpolation methods generate intermediate frames by inferring object motions in the image from consecutive key-frames. In the absence of additional information, first-order approximations, i.e. optical flow, must be used, but this choice restricts the types of motions that can be modeled, leading to errors in highly dynamic scenarios. Event cameras are novel sensors that address this limitation by providing auxiliary visual information in the blind-time between frames. They asynchronously measure per-pixel brightness changes and do this with high temporal resolution and low latency. Event-based frame interpolation methods typically adopt a synthesis-based approach, where predicted frame residuals are directly applied to the key-frames. However, while these approaches can capture non-linear motions they suffer from ghosting and perform poorly in low-texture regions with few events. Thus, synthesis-based and flow-based approaches are complementary. In this work, we introduce Time Lens, a novel indicates equal contribution method that leverages the advantages of both. We extensively evaluate our method on three synthetic and two real benchmarks where we show an up to 5.21 dB improvement in terms of PSNR over state-of-the-art frame-based and event-based methods. Finally, we release a new large-scale dataset in highly dynamic scenarios, aimed at pushing the limits of existing methods.