 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Situational Awareness in ISAC Networks via Drone Swarms: A Real-World Channel Sounding Data Set
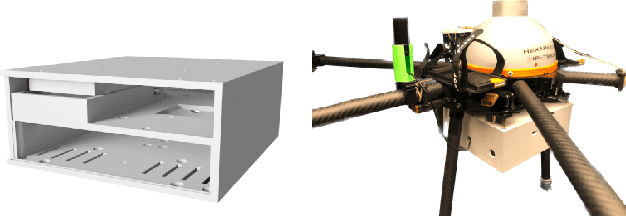
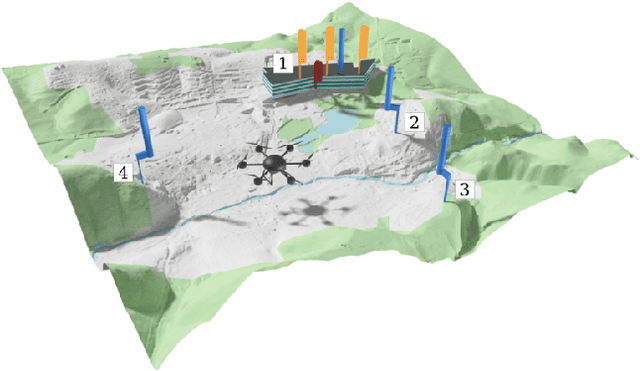
Jul 16, 2025With the upcoming capabilities of integrated sensing and communication (ISAC) and the incorporation of user equipment (UE) like unmanned aerial vehicles (UAVs) in 6G mobile networks, there is a significant opportunity to enhance situational awareness through multi-static radar sensing in meshed ISAC networks. This paper presents a real-world channel sounding data set acquired using a testbed with synchronized, distributed ground-based sensor nodes and flying sensor nodes within a swarm of up to four drones. The conducted measurement campaign is designed to sense the bi-static reflectivity of objects such as parking cars, vertical take-off and landing (VTOL) aircraft, and small drones in multi-path environments. We detail the rationale behind the selection of the included scenarios and the configuration of the participating nodesand present exemplary results to demonstrate the potential of using collaborating drone swarms for multi-static radar tracking and localization in air-to-air (A2A) and air-to-ground (A2G) scenarios. The data sets are publicly available to support the development and validation of future ISAC algorithms in real-world environments rather than relying solely on simulation.
Bistatic Micro-Doppler Analysis of a Vertical Takeoff and Landing (VTOL) Drone in ICAS Framework
Feb 12, 2025Integrated Communication and Sensing (ICAS) is a key technology that enables sensing functionalities within the next-generation mobile communication (6G). Joint design and optimization of both functionalities could allow coexistence, therefore it advances toward joint signal processing and using the same hardware platform and common spectrum. Contributing to ICAS sensing, this paper presents the measurement and analysis of the micro-Doppler signature of Vertical Takeoff and Landing (VTOL) drones. Measurement is performed with an OFDM-like communication signal and bistatic constellation, which is a typical case in ICAS scenarios. This work shows that micro-Doppler signatures can be used to precisely distinguish flight modes, such as take-off, landing, hovering, transition, and cruising.
Sounding-Based Evaluation of Multi-Sensor ISAC Networks for Drone Applications: Measurement and Simulation Perspectives
Feb 26, 2024



With the upcoming multitude of commercial and public applications envisioned in the mobile 6G radio landscape using unmanned aerial vehicles (UAVs), integrated sensing and communication (ISAC) plays a key role to enable the detection and localization of passive objects with radar sensing, while optimizing the utilization of scarce resources. To explore the potential of future ISAC architectures with UAVs as mobile nodes in distributed multi-sensor networks, the system's fundamental capability to detect static and dynamic objects that reveal themselves by their bi-static back-scattering needs to be evaluated. Therefore, this paper addresses simulation- and measurement based data acquisition methods to gather knowledge about the bistatic reflectivity of single objects including their Micro-Doppler signature for object identification as well as the influence of multipath propagation in different environments on the localization accuracy and radar tracking performance. We show exemplary results from simulation models, bi-static reflectivity measurements in laboratory environment and real-flight channel sounding experiments in selected scenarios showcasing the potential of synthetic and measured data sets for development and evaluation of ISAC algorithms. The presented measurement data sets are publicly available to encourage the academic RF community to validate future algorithms using realistic scenarios alongside simulations models.
Measurement Testbed for Radar and Emitter Localization of UAV at 3.75 GHz
Oct 13, 2022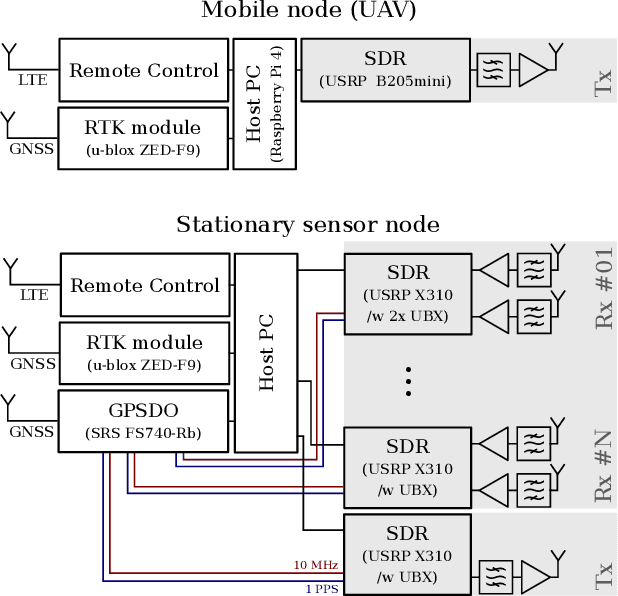
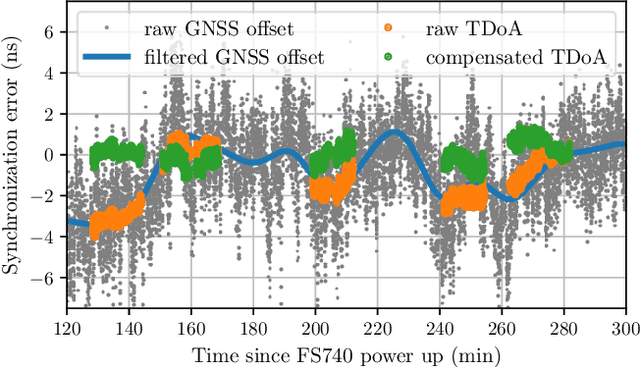
This paper presents an experimental measurement platform for the research and development of unmanned aerial vehicles (UAVs) localization algorithms using radio emission and reflectivity. We propose a cost-effective, flexible testbed made from commercial off-the-shelf (COTS) devices to allow academic research regarding the upcoming integration of UAV surveillance in existing mobile radio networks in terms of integrated sensing and communication (ISAC). The system enables nanosecond-level synchronization accuracy and centimeter-level positioning accuracy for multiple distributed sensor nodes and a mobile UAV-mounted node. Results from a real-world measurement in a 16 km2 urban area demonstrate the system's performance with both emitter localization as well as with the radar setup.