 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRay-Based Simulation of Scattering from Discretized Curved Bodies for Vehicular and ISAC Applications
Apr 07, 2026Realistic modeling of scattering from curved metallic bodies - such as vehicles and roadside structures - is essential for cellular and vehicular channel modeling as well as radar applications. A practical approach is to approximate curved surfaces with planar facets and apply ray-tracing with diffraction methods; however, accuracy depends critically on both geometric discretization and diffraction modeling. This work investigates ray-tracing-based modeling of near-field scattering from curved bodies, including the forward (shadow) region, using the Uniform Theory of Diffraction (UTD), extended with vertex diffraction and double-bounce interactions. A discretization strategy linking facet size to local curvature and wavelength is proposed to balance geometric fidelity, computational accuracy and efficiency. Validation is performed against analytical solutions and full-wave simulations for canonical geometries (sphere and circular cylinder), as well as a realistic vehicle model to demonstrate the method's practical relevance. Results show that appropriate discretization combined with extended diffraction modeling significantly improves scattering prediction from curved bodies, providing a computationally efficient framework for vehicular propagation and integrated sensing and communication (ISAC) channel modeling.
Distributed Multisensor ISAC
Nov 17, 2025Integrated Sensing and Communications (ISAC) will become a service in future mobile communication networks. It enables the detection and recognition of passive objects and environments using radar-like sensing. The ultimate advantage is the reuse of the mobile network and radio access resources for scene illumination, sensing, data transportation, computation, and fusion. It enables building a distributed, ubiquitous sensing network that can be adapted for a variety of radio sensing tasks and services. In this article, we develop the principles of multi-sensor ISAC (MS-ISAC). MS-ISAC corresponds to multi-user MIMO communication, which in radar terminology is known as distributed MIMO radar. \ First, we develop basic architectural principles for MS-ISAC and link them to example use cases. We then propose a generic MS-ISAC architecture. After a brief reference to multipath propagation and multistatic target reflectivity issues, we outline multilink access, coordination, precoding and link adaptation schemes for MS-ISAC. Moreover, we review model-based estimation and tracking of delay~/~Doppler from sparse OFDMA~/~TDMA frames. We emphasize Cooperative Passive Coherent Location (CPCL) for bistatic correlation and synchronization. Finally, issues of multisensor node synchronization and distributed data fusion are addressed.
Enhancing Situational Awareness in ISAC Networks via Drone Swarms: A Real-World Channel Sounding Data Set
Jul 16, 2025With the upcoming capabilities of integrated sensing and communication (ISAC) and the incorporation of user equipment (UE) like unmanned aerial vehicles (UAVs) in 6G mobile networks, there is a significant opportunity to enhance situational awareness through multi-static radar sensing in meshed ISAC networks. This paper presents a real-world channel sounding data set acquired using a testbed with synchronized, distributed ground-based sensor nodes and flying sensor nodes within a swarm of up to four drones. The conducted measurement campaign is designed to sense the bi-static reflectivity of objects such as parking cars, vertical take-off and landing (VTOL) aircraft, and small drones in multi-path environments. We detail the rationale behind the selection of the included scenarios and the configuration of the participating nodesand present exemplary results to demonstrate the potential of using collaborating drone swarms for multi-static radar tracking and localization in air-to-air (A2A) and air-to-ground (A2G) scenarios. The data sets are publicly available to support the development and validation of future ISAC algorithms in real-world environments rather than relying solely on simulation.
Measurement-based Evaluation of CNN-based Detection and Estimation for ISAC Systems
Jul 02, 2025In wireless sensing applications, such as ISAC, one of the first crucial signal processing steps is the detection and estimation targets from a channel estimate. Effective algorithms in this context must be robust across a broad SNR range, capable of handling an unknown number of targets, and computationally efficient for real-time implementation. During the last decade, different Machine Learning methods have emerged as promising solutions, either as standalone models or as complementing existing techniques. However, since models are often trained and evaluated on synthetic data from existing models, applying them to measurement is challenging. All the while, training directly on measurement data is prohibitive in complex propagation scenarios as a groundtruth is not available. Therefore, in this paper, we train a CNN approach for target detection and estimation on synthetic data and evaluate it on measurement data from a suburban outdoor measurement. Using knowledge of the environment as well as available groundtruth positions, we study the detection probability and accuracy of our approach. The results demonstrate that our approach works on measurement data and is suitable for joint detection and estimation of sensing targets in ISAC systems.
Modeling Micro-Doppler Signature of Multi-Propeller Drones in Distributed ISAC
Apr 07, 2025



Integrated Sensing and Communication (ISAC) will be one key feature of future 6G networks, enabling simultaneous communication and radar sensing. The radar sensing geometry of ISAC will be multistatic since that corresponds to the common distributed structure of a mobile communication network. Within this framework, micro-Doppler analysis plays a vital role in classifying targets based on their micromotions, such as rotating propellers, vibration, or moving limbs. However, research on bistatic micro-Doppler effects, particularly in ISAC systems utilizing OFDM waveforms, remains limited. Existing methods, including electromagnetic simulations often lack scalability for generating the large datasets required to train machine learning algorithms. To address this gap, this work introduces an OFDM-based bistatic micro-Doppler model for multi-propeller drones. The proposed model adapts the classic thin-wire model to include bistatic sensing configuration with an OFDM-like signal. Then, it extends further by incorporating multiple propellers and integrating the reflectivity of the drone's static parts. Measurements were performed to collect ground truth data for verification of the proposed model. Validation results show that the model generates micro-Doppler signatures closely resembling those obtained from measurements, demonstrating its potential as a tool for data generation. In addition, it offers a comprehensive approach to analyzing bistatic micro-Doppler effects.
Joint Delay-Doppler Estimation using OFDMA Payloads for Integrated Sensing and Communications
Mar 06, 2025


The use of future communication systems for sensing offers the potential for a number of new applications. In this paper, we show that leveraging user data payloads in multi-node Orthogonal Frequency Division Multiple Access (OFDMA) networks for estimating target delay and Doppler-shift parameters can yield a significant advantage in SNR and addressable bandwidth. However, gaps in the frequency-time resources, reference signal boosting and amplitude modulation schemes introduce challenges for estimation at the sensing receiver. In this work, we propose a joint delay and Doppler-shift model-based estimator designed to address these challenges. Furthermore, we demonstrate that incorporating knowledge of the device model into the estimation procedure helps mitigate the effects of the non-ideal radar ambiguity function caused by amplitude-modulated user payloads and sparse reference signals. Simulation results demonstrate that the estimator achieves the theoretical lower bound on estimation variance.
Bistatic Micro-Doppler Analysis of a Vertical Takeoff and Landing (VTOL) Drone in ICAS Framework
Feb 12, 2025Integrated Communication and Sensing (ICAS) is a key technology that enables sensing functionalities within the next-generation mobile communication (6G). Joint design and optimization of both functionalities could allow coexistence, therefore it advances toward joint signal processing and using the same hardware platform and common spectrum. Contributing to ICAS sensing, this paper presents the measurement and analysis of the micro-Doppler signature of Vertical Takeoff and Landing (VTOL) drones. Measurement is performed with an OFDM-like communication signal and bistatic constellation, which is a typical case in ICAS scenarios. This work shows that micro-Doppler signatures can be used to precisely distinguish flight modes, such as take-off, landing, hovering, transition, and cruising.
Newtonized Orthogonal Matching Pursuit for High-Resolution Target Detection in Sparse OFDM ISAC Systems
Nov 05, 2024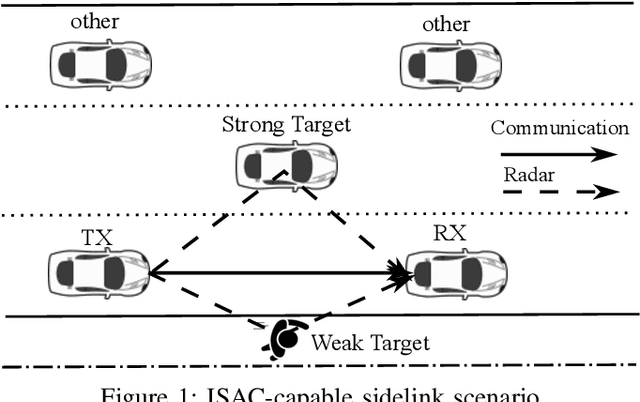
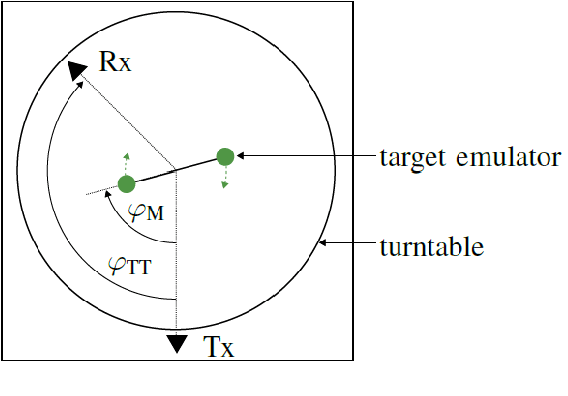
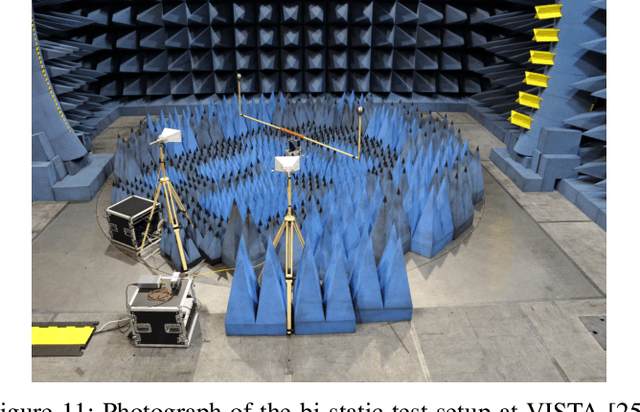
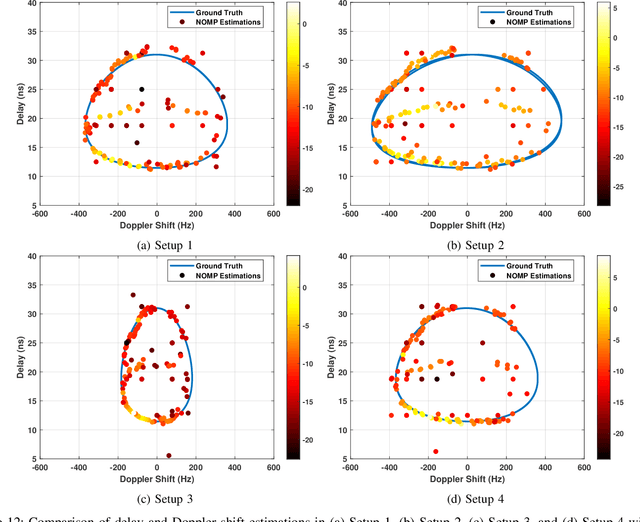
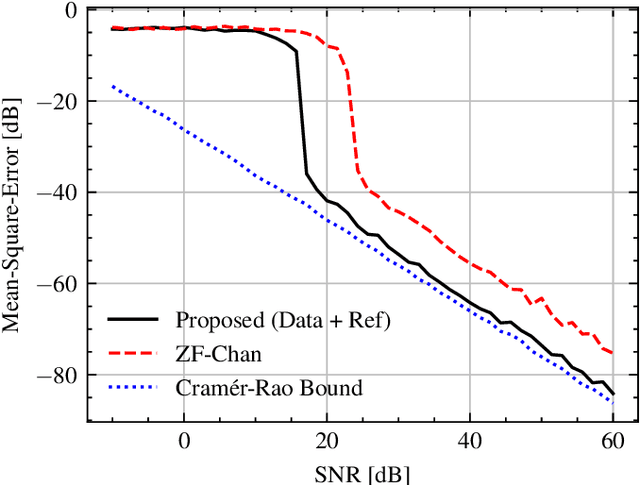
Integrated Sensing and Communication (ISAC) is a technology paradigm that combines sensing capabilities with communication functionalities in a single device or system. In vehicle-to-everything (V2X) sidelink, ISAC can provide enhanced safety by allowing vehicles to not only communicate with one another but also sense the surrounding environment by using sidelink signals. In ISAC-capable V2X sidelink, the random resource allocation results in an unstructured and sparse distribution of time and frequency resources in the received orthogonal frequency division multiplexing (OFDM) grid, leading to degraded radar detection performance when processed using the conventional 2D-FFT method. To address this challenge, this paper proposes a high-resolution off-grid radar target detection algorithm irrespective of the OFDM grid structure. The proposed method utilizes the Newtonized orthogonal matching pursuit (NOMP) algorithm to effectively detect weak targets masked by the sidelobes of stronger ones and accurately estimates off-grid range and velocity parameters with minimal resources through Newton refinements. Simulation results demonstrate the superior performance of the proposed NOMP-based target detection algorithm compared to existing compressed sensing (CS) methods in terms of detection probability, resolution, and accuracy. Additionally, experimental validation is performed using a bi-static radar setup in a semi-anechoic chamber. The measurement results validate the simulation findings, showing that the proposed algorithm significantly enhances target detection and parameter estimation accuracy in realistic scenarios.
Sounding-Based Evaluation of Multi-Sensor ISAC Networks for Drone Applications: Measurement and Simulation Perspectives
Feb 26, 2024



With the upcoming multitude of commercial and public applications envisioned in the mobile 6G radio landscape using unmanned aerial vehicles (UAVs), integrated sensing and communication (ISAC) plays a key role to enable the detection and localization of passive objects with radar sensing, while optimizing the utilization of scarce resources. To explore the potential of future ISAC architectures with UAVs as mobile nodes in distributed multi-sensor networks, the system's fundamental capability to detect static and dynamic objects that reveal themselves by their bi-static back-scattering needs to be evaluated. Therefore, this paper addresses simulation- and measurement based data acquisition methods to gather knowledge about the bistatic reflectivity of single objects including their Micro-Doppler signature for object identification as well as the influence of multipath propagation in different environments on the localization accuracy and radar tracking performance. We show exemplary results from simulation models, bi-static reflectivity measurements in laboratory environment and real-flight channel sounding experiments in selected scenarios showcasing the potential of synthetic and measured data sets for development and evaluation of ISAC algorithms. The presented measurement data sets are publicly available to encourage the academic RF community to validate future algorithms using realistic scenarios alongside simulations models.
Accelerating Innovation in 6G Research: Real-Time Capable SDR System Architecture for Rapid Prototyping
Feb 22, 2024



The next global mobile communication standard 6G strives to push the technological limits of radio frequency (RF) communication even further than its predecessors: Data rates beyond 100 Gbit/s, RF bandwidths above 1 GHz, and sub-millisecond latency necessitate very high performance development tools to enable the extent of innovation required for 6G's likely features. We propose a new SDR firmware and software architecture designed explicitly to meet these challenging requirements. It relies on Ethernet and commercial off-the-shelf network and server components to maximize flexibility and to reduce costs. We analyze state-of-the-art solutions (USRP X440 and other RFSoC-based systems), derive architectural design goals, explain resulting design decision in detail, and exemplify our architecture's implementation on the XCZU48DR RFSoC. Finally, we prove its performance via measurements and outline how the architecture surpasses the state-of-the-art with respect to sustained RF recording while maintaining high Ethernet bandwidth efficiency. Building a micro-Doppler radar example, we demonstrate its real-time and rapid application development capabilities.