 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable, Physics Aware, Trustworthy AI Paradigm Shift for Synthetic Aperture Radar
Jan 09, 2023


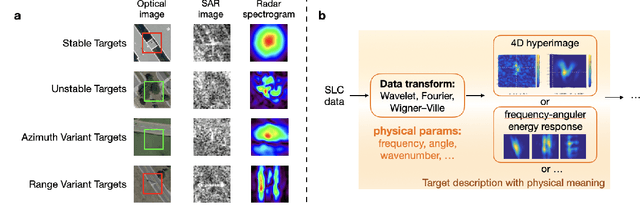
The recognition or understanding of the scenes observed with a SAR system requires a broader range of cues, beyond the spatial context. These encompass but are not limited to: imaging geometry, imaging mode, properties of the Fourier spectrum of the images or the behavior of the polarimetric signatures. In this paper, we propose a change of paradigm for explainability in data science for the case of Synthetic Aperture Radar (SAR) data to ground the explainable AI for SAR. It aims to use explainable data transformations based on well-established models to generate inputs for AI methods, to provide knowledgeable feedback for training process, and to learn or improve high-complexity unknown or un-formalized models from the data. At first, we introduce a representation of the SAR system with physical layers: i) instrument and platform, ii) imaging formation, iii) scattering signatures and objects, that can be integrated with an AI model for hybrid modeling. Successively, some illustrative examples are presented to demonstrate how to achieve hybrid modeling for SAR image understanding. The perspective of trustworthy model and supplementary explanations are discussed later. Finally, we draw the conclusion and we deem the proposed concept has applicability to the entire class of coherent imaging sensors and other computational imaging systems.
EAutoDet: Efficient Architecture Search for Object Detection
Mar 21, 2022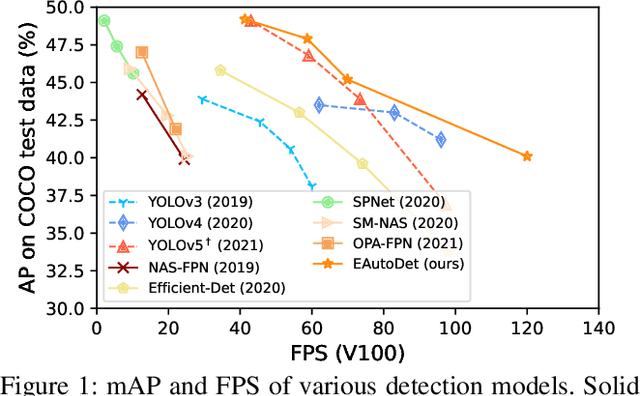
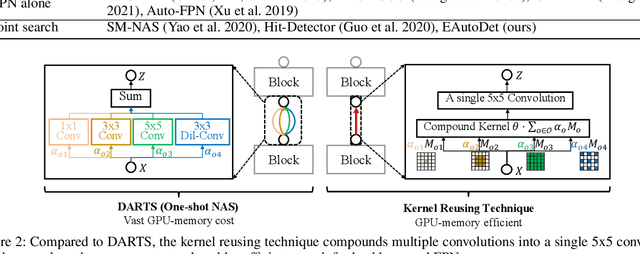
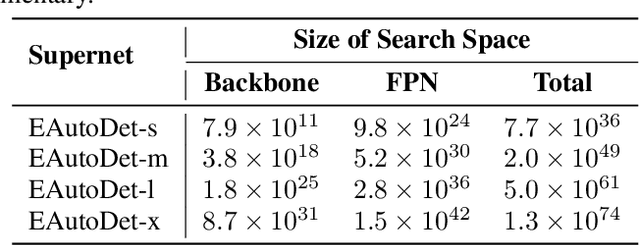
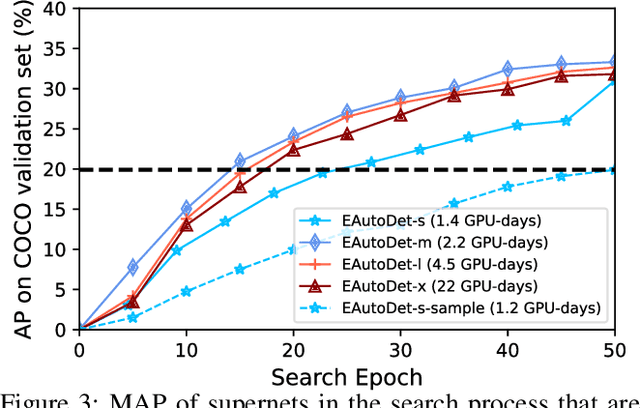
Training CNN for detection is time-consuming due to the large dataset and complex network modules, making it hard to search architectures on detection datasets directly, which usually requires vast search costs (usually tens and even hundreds of GPU-days). In contrast, this paper introduces an efficient framework, named EAutoDet, that can discover practical backbone and FPN architectures for object detection in 1.4 GPU-days. Specifically, we construct a supernet for both backbone and FPN modules and adopt the differentiable method. To reduce the GPU memory requirement and computational cost, we propose a kernel reusing technique by sharing the weights of candidate operations on one edge and consolidating them into one convolution. A dynamic channel refinement strategy is also introduced to search channel numbers. Extensive experiments show significant efficacy and efficiency of our method. In particular, the discovered architectures surpass state-of-the-art object detection NAS methods and achieve 40.1 mAP with 120 FPS and 49.2 mAP with 41.3 FPS on COCO test-dev set. We also transfer the discovered architectures to rotation detection task, which achieve 77.05 mAP$_{\text{50}}$ on DOTA-v1.0 test set with 21.1M parameters.