 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustrial Robot Grasping with Deep Learning using a Programmable Logic Controller (PLC)
Apr 21, 2020
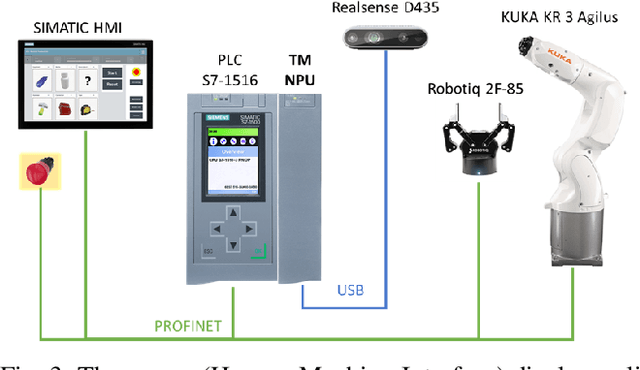
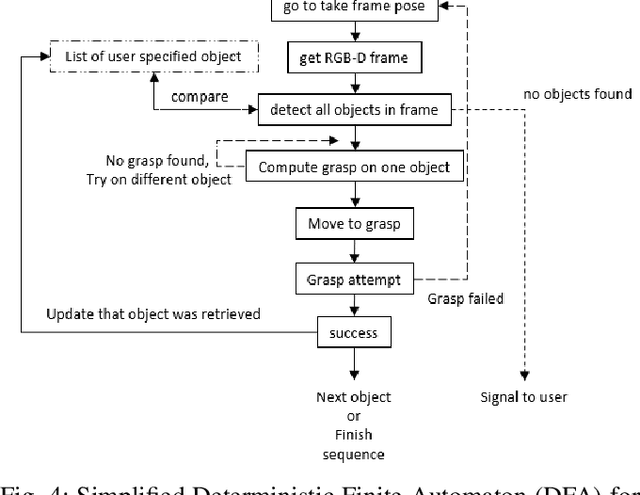
Universal grasping of a diverse range of previously unseen objects from heaps is a grand challenge in e-commerce order fulfillment, manufacturing, and home service robotics. Recently, deep learning based grasping approaches have demonstrated results that make them increasingly interesting for industrial deployments. This paper explores the problem from an automation systems point-of-view. We develop a robotics grasping system using Dex-Net, which is fully integrated at the controller level. Two neural networks are deployed on a novel industrial AI hardware acceleration module close to a PLC with a power footprint of less than 10 W for the overall system. The software is tightly integrated with the hardware allowing for fast and efficient data processing and real-time communication. The success rate of grasping an object form a bin is up to 95 percent with more than 350 picks per hour, if object and receptive bins are in close proximity. The system was presented at the Hannover Fair 2019 (world s largest industrial trade fair) and other events, where it performed over 5,000 grasps per event.
LFZip: Lossy compression of multivariate floating-point time series data via improved prediction
Nov 01, 2019
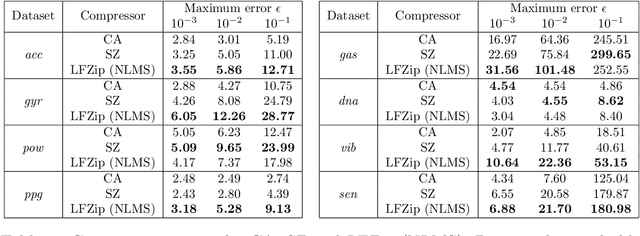
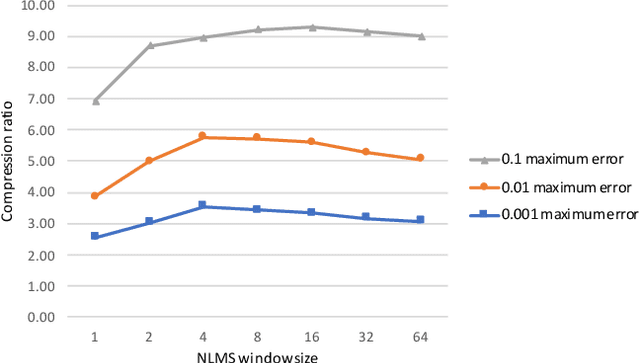
Time series data compression is emerging as an important problem with the growth in IoT devices and sensors. Due to the presence of noise in these datasets, lossy compression can often provide significant compression gains without impacting the performance of downstream applications. In this work, we propose an error-bounded lossy compressor, LFZip, for multivariate floating-point time series data that provides guaranteed reconstruction up to user-specified maximum absolute error. The compressor is based on the prediction-quantization-entropy coder framework and benefits from improved prediction using linear models and neural networks. We evaluate the compressor on several time series datasets where it outperforms the existing state-of-the-art error-bounded lossy compressors. The code and data are available at https://github.com/shubhamchandak94/LFZip