 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
Demonstrating Mobile Manipulation in the Wild: A Metrics-Driven Approach
Jan 03, 2024



We present our general-purpose mobile manipulation system consisting of a custom robot platform and key algorithms spanning perception and planning. To extensively test the system in the wild and benchmark its performance, we choose a grocery shopping scenario in an actual, unmodified grocery store. We derive key performance metrics from detailed robot log data collected during six week-long field tests, spread across 18 months. These objective metrics, gained from complex yet repeatable tests, drive the direction of our research efforts and let us continuously improve our system's performance. We find that thorough end-to-end system-level testing of a complex mobile manipulation system can serve as a reality-check for state-of-the-art methods in robotics. This effectively grounds robotics research efforts in real world needs and challenges, which we deem highly useful for the advancement of the field. To this end, we share our key insights and takeaways to inspire and accelerate similar system-level research projects.
A Mobile Manipulation System for One-Shot Teaching of Complex Tasks in Homes
Oct 03, 2019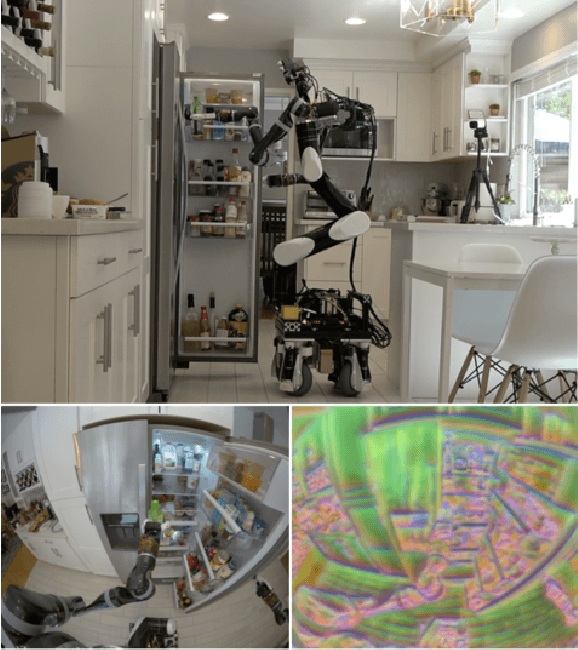
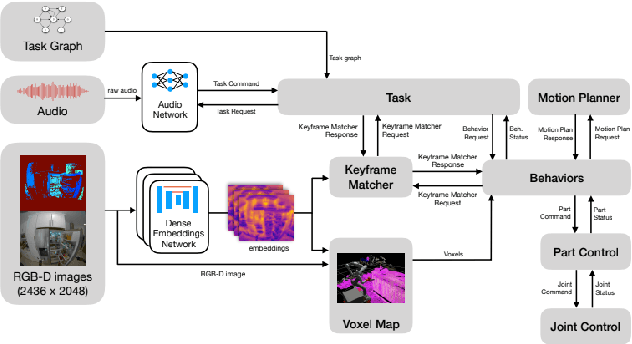
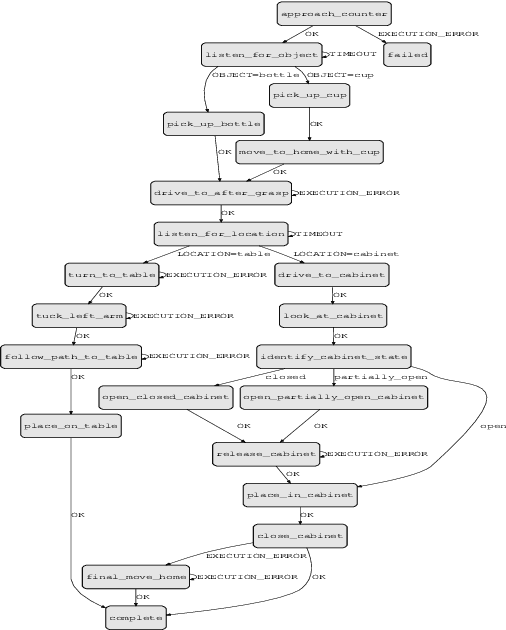

We describe a mobile manipulation hardware and software system capable of autonomously performing complex human-level tasks in real homes, after being taught the task with a single demonstration from a person in virtual reality. This is enabled by a highly capable mobile manipulation robot, whole-body task space hybrid position/force control, teaching of parameterized primitives linked to a robust learned dense visual embeddings representation of the scene, and a task graph of the taught behaviors. We demonstrate the robustness of the approach by presenting results for performing a variety of tasks, under different environmental conditions, in multiple real homes. Our approach achieves 85% overall success rate on three tasks that consist of an average of 45 behaviors each.