 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robot Swarm Tactics over Complex Adversarial Environments
Sep 13, 2021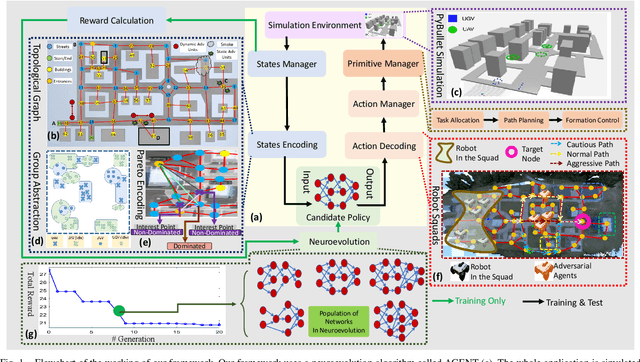
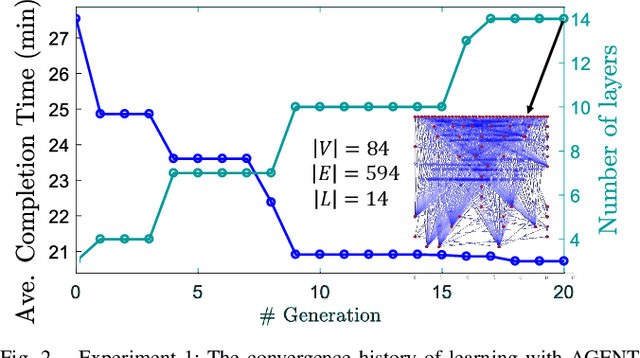
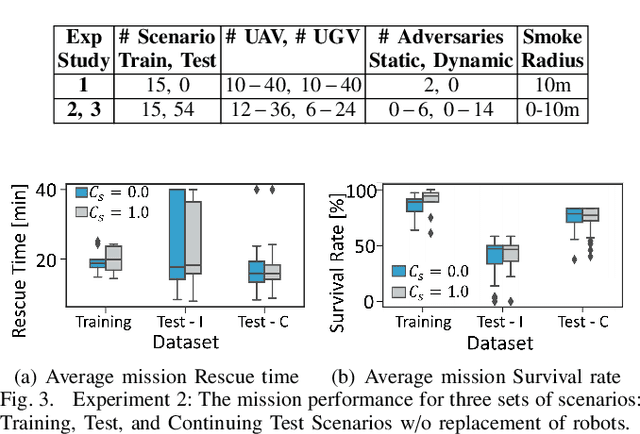
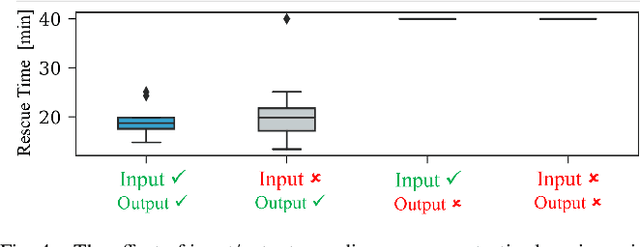
To accomplish complex swarm robotic missions in the real world, one needs to plan and execute a combination of single robot behaviors, group primitives such as task allocation, path planning, and formation control, and mission-specific objectives such as target search and group coverage. Most such missions are designed manually by teams of robotics experts. Recent work in automated approaches to learning swarm behavior has been limited to individual primitives with sparse work on learning complete missions. This paper presents a systematic approach to learn tactical mission-specific policies that compose primitives in a swarm to accomplish the mission efficiently using neural networks with special input and output encoding. To learn swarm tactics in an adversarial environment, we employ a combination of 1) map-to-graph abstraction, 2) input/output encoding via Pareto filtering of points of interest and clustering of robots, and 3) learning via neuroevolution and policy gradient approaches. We illustrate this combination as critical to providing tractable learning, especially given the computational cost of simulating swarm missions of this scale and complexity. Successful mission completion outcomes are demonstrated with up to 60 robots. In addition, a close match in the performance statistics in training and testing scenarios shows the potential generalizability of the proposed framework.