 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull Shot Predictions for the DIII-D Tokamak via Deep Recurrent Networks
Apr 18, 2024



Although tokamaks are one of the most promising devices for realizing nuclear fusion as an energy source, there are still key obstacles when it comes to understanding the dynamics of the plasma and controlling it. As such, it is crucial that high quality models are developed to assist in overcoming these obstacles. In this work, we take an entirely data driven approach to learn such a model. In particular, we use historical data from the DIII-D tokamak to train a deep recurrent network that is able to predict the full time evolution of plasma discharges (or "shots"). Following this, we investigate how different training and inference procedures affect the quality and calibration of the shot predictions.
Exploration via Planning for Information about the Optimal Trajectory
Oct 06, 2022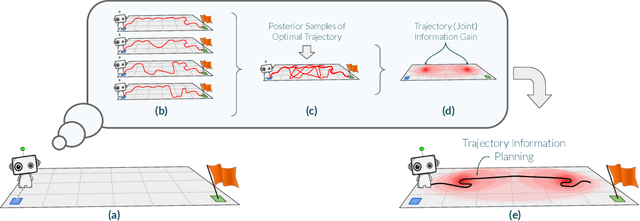

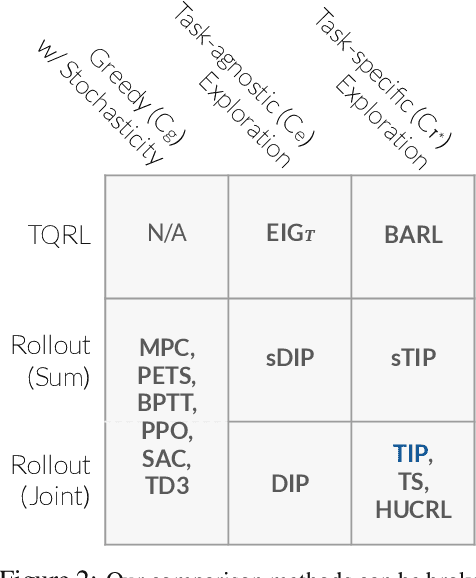
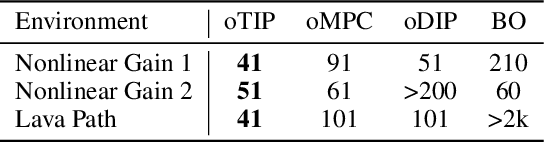
Many potential applications of reinforcement learning (RL) are stymied by the large numbers of samples required to learn an effective policy. This is especially true when applying RL to real-world control tasks, e.g. in the sciences or robotics, where executing a policy in the environment is costly. In popular RL algorithms, agents typically explore either by adding stochasticity to a reward-maximizing policy or by attempting to gather maximal information about environment dynamics without taking the given task into account. In this work, we develop a method that allows us to plan for exploration while taking both the task and the current knowledge about the dynamics into account. The key insight to our approach is to plan an action sequence that maximizes the expected information gain about the optimal trajectory for the task at hand. We demonstrate that our method learns strong policies with 2x fewer samples than strong exploration baselines and 200x fewer samples than model free methods on a diverse set of low-to-medium dimensional control tasks in both the open-loop and closed-loop control settings.