 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling up ML-based Black-box Planning with Partial STRIPS Models
Jul 10, 2022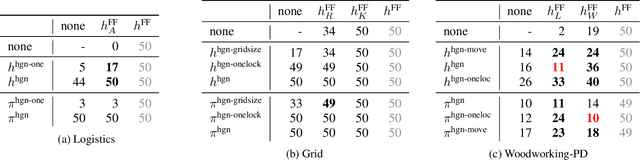
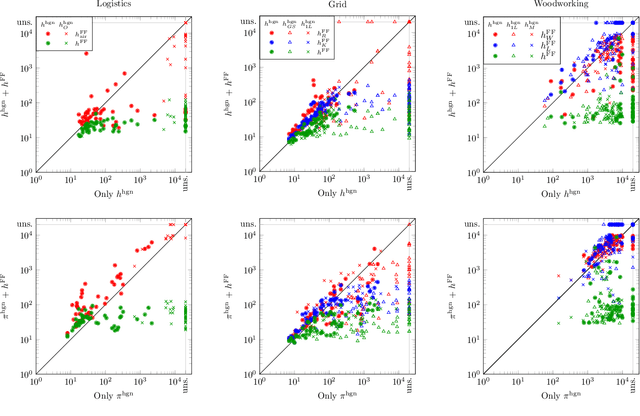
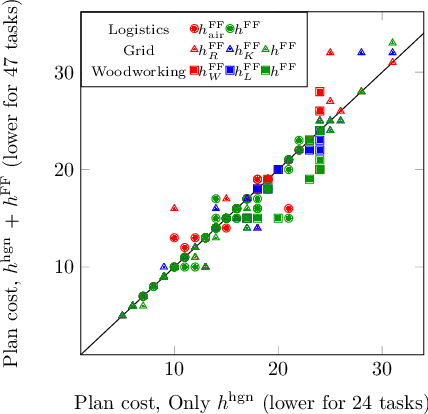

A popular approach for sequential decision-making is to perform simulator-based search guided with Machine Learning (ML) methods like policy learning. On the other hand, model-relaxation heuristics can guide the search effectively if a full declarative model is available. In this work, we consider how a practitioner can improve ML-based black-box planning on settings where a complete symbolic model is not available. We show that specifying an incomplete STRIPS model that describes only part of the problem enables the use of relaxation heuristics. Our findings on several planning domains suggest that this is an effective way to improve ML-based black-box planning beyond collecting more data or tuning ML architectures.
How a General-Purpose Commonsense Ontology can Improve Performance of Learning-Based Image Retrieval
May 24, 2017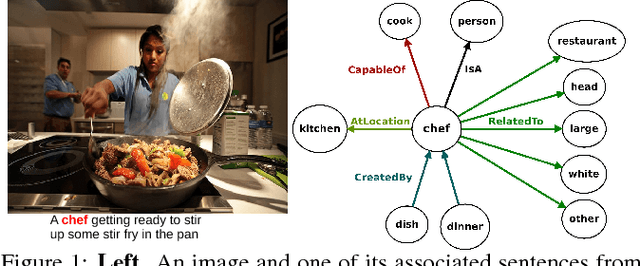
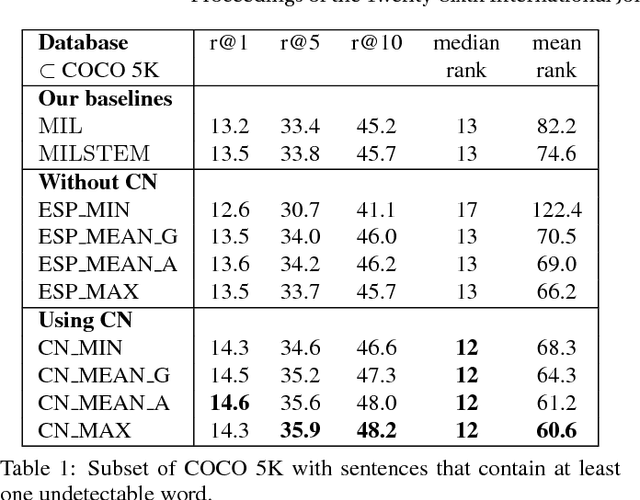
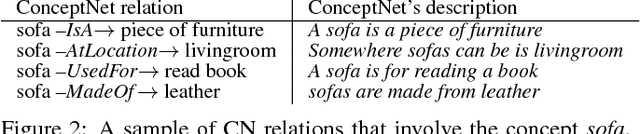
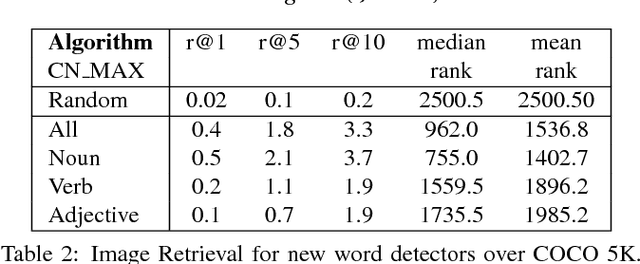
The knowledge representation community has built general-purpose ontologies which contain large amounts of commonsense knowledge over relevant aspects of the world, including useful visual information, e.g.: "a ball is used by a football player", "a tennis player is located at a tennis court". Current state-of-the-art approaches for visual recognition do not exploit these rule-based knowledge sources. Instead, they learn recognition models directly from training examples. In this paper, we study how general-purpose ontologies---specifically, MIT's ConceptNet ontology---can improve the performance of state-of-the-art vision systems. As a testbed, we tackle the problem of sentence-based image retrieval. Our retrieval approach incorporates knowledge from ConceptNet on top of a large pool of object detectors derived from a deep learning technique. In our experiments, we show that ConceptNet can improve performance on a common benchmark dataset. Key to our performance is the use of the ESPGAME dataset to select visually relevant relations from ConceptNet. Consequently, a main conclusion of this work is that general-purpose commonsense ontologies improve performance on visual reasoning tasks when properly filtered to select meaningful visual relations.
Finite LTL Synthesis is EXPTIME-complete
Nov 17, 2016
LTL synthesis -- the construction of a function to satisfy a logical specification formulated in Linear Temporal Logic -- is a 2EXPTIME-complete problem with relevant applications in controller synthesis and a myriad of artificial intelligence applications. In this research note we consider De Giacomo and Vardi's variant of the synthesis problem for LTL formulas interpreted over finite rather than infinite traces. Rather surprisingly, given the existing claims on complexity, we establish that LTL synthesis is EXPTIME-complete for the finite interpretation, and not 2EXPTIME-complete as previously reported. Our result coincides nicely with the planning perspective where non-deterministic planning with full observability is EXPTIME-complete and partial observability increases the complexity to 2EXPTIME-complete; a recent related result for LTL synthesis shows that in the finite case with partial observability, the problem is 2EXPTIME-complete.