 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling up ML-based Black-box Planning with Partial STRIPS Models
Jul 10, 2022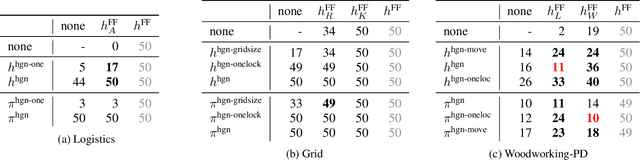
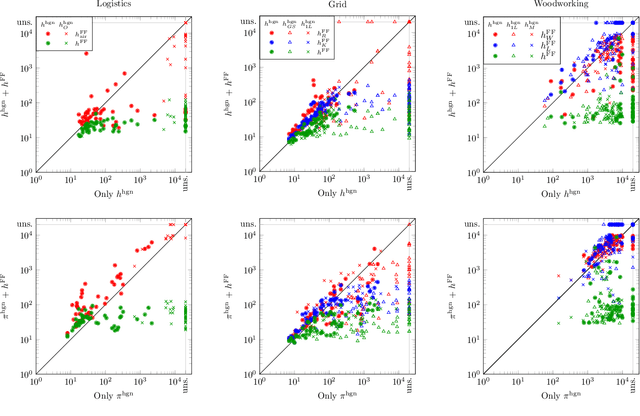
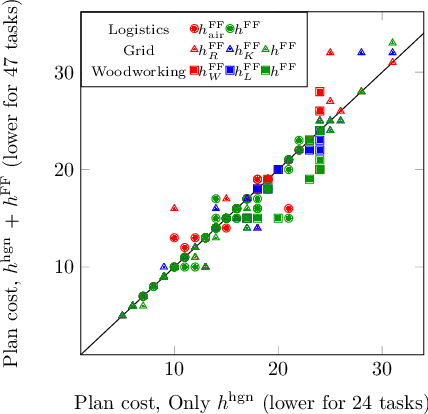

A popular approach for sequential decision-making is to perform simulator-based search guided with Machine Learning (ML) methods like policy learning. On the other hand, model-relaxation heuristics can guide the search effectively if a full declarative model is available. In this work, we consider how a practitioner can improve ML-based black-box planning on settings where a complete symbolic model is not available. We show that specifying an incomplete STRIPS model that describes only part of the problem enables the use of relaxation heuristics. Our findings on several planning domains suggest that this is an effective way to improve ML-based black-box planning beyond collecting more data or tuning ML architectures.
Generating Instructions at Different Levels of Abstraction
Oct 08, 2020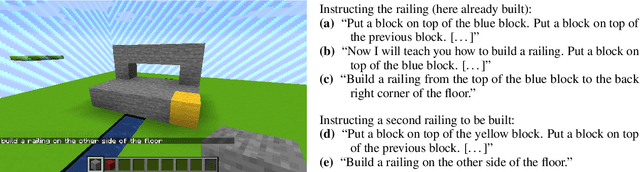
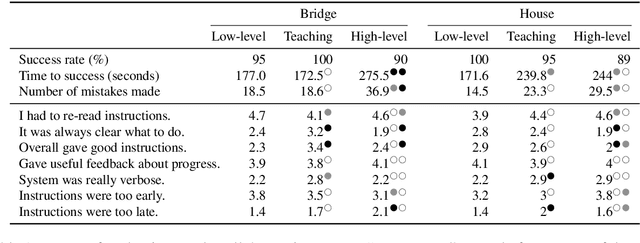

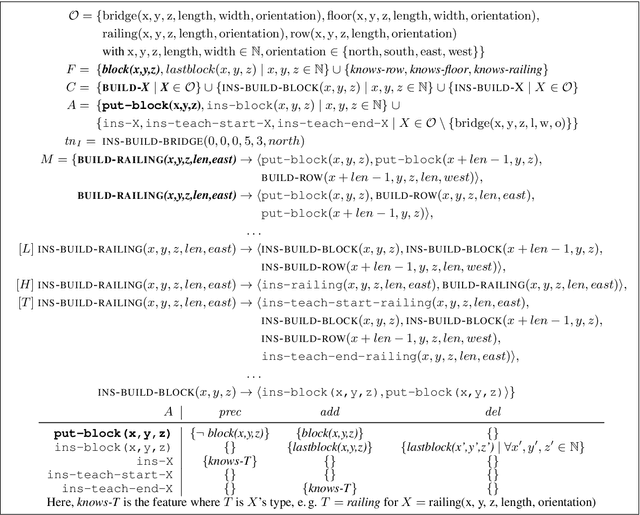
When generating technical instructions, it is often convenient to describe complex objects in the world at different levels of abstraction. A novice user might need an object explained piece by piece, while for an expert, talking about the complex object (e.g. a wall or railing) directly may be more succinct and efficient. We show how to generate building instructions at different levels of abstraction in Minecraft. We introduce the use of hierarchical planning to this end, a method from AI planning which can capture the structure of complex objects neatly. A crowdsourcing evaluation shows that the choice of abstraction level matters to users, and that an abstraction strategy which balances low-level and high-level object descriptions compares favorably to ones which don't.
Lex-Partitioning: A New Option for BDD Search
Oct 24, 2012



For the exploration of large state spaces, symbolic search using binary decision diagrams (BDDs) can save huge amounts of memory and computation time. State sets are represented and modified by accessing and manipulating their characteristic functions. BDD partitioning is used to compute the image as the disjunction of smaller subimages. In this paper, we propose a novel BDD partitioning option. The partitioning is lexicographical in the binary representation of the states contained in the set that is represented by a BDD and uniform with respect to the number of states represented. The motivation of controlling the state set sizes in the partitioning is to eventually bridge the gap between explicit and symbolic search. Let n be the size of the binary state vector. We propose an O(n) ranking and unranking scheme that supports negated edges and operates on top of precomputed satcount values. For the uniform split of a BDD, we then use unranking to provide paths along which we partition the BDDs. In a shared BDD representation the efforts are O(n). The algorithms are fully integrated in the CUDD library and evaluated in strongly solving general game playing benchmarks.
* In Proceedings GRAPHITE 2012, arXiv:1210.6118