 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Neural Networks with Fourier-Feature Inputs for Free-breathing Cardiac MRI Reconstruction
May 11, 2023



In this paper, we propose an approach for cardiac magnetic resonance imaging (MRI), which aims to reconstruct a real-time video of a beating heart from continuous highly under-sampled measurements. This task is challenging since the object to be reconstructed (the heart) is continuously changing during signal acquisition. To address this challenge, we represent the beating heart with an implicit neural network and fit the network so that the representation of the heart is consistent with the measurements. The network in the form of a multi-layer perceptron with Fourier-feature inputs acts as an effective signal prior and enables adjusting the regularization strength in both the spatial and temporal dimensions of the signal. We examine the proposed approach for 2D free-breathing cardiac real-time MRI in different operating regimes, i.e., for different image resolutions, slice thicknesses, and acquisition lengths. Our method achieves reconstruction quality on par with or slightly better than state-of-the-art untrained convolutional neural networks and superior image quality compared to a recent method that fits an implicit representation directly to Fourier-domain measurements. However, this comes at a higher computational cost. Our approach does not require any additional patient data or biosensors including electrocardiography, making it potentially applicable in a wide range of clinical scenarios.
Personalized Rehabilitation Robotics based on Online Learning Control
Oct 01, 2021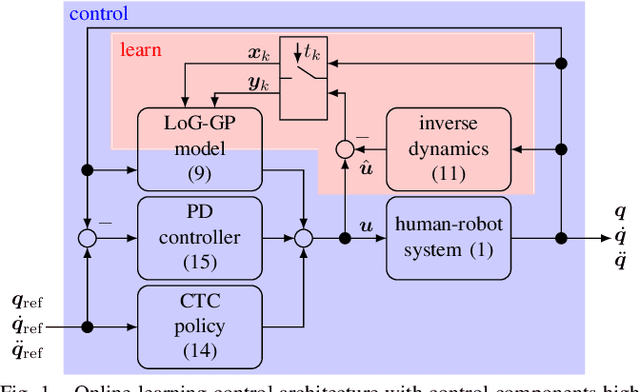
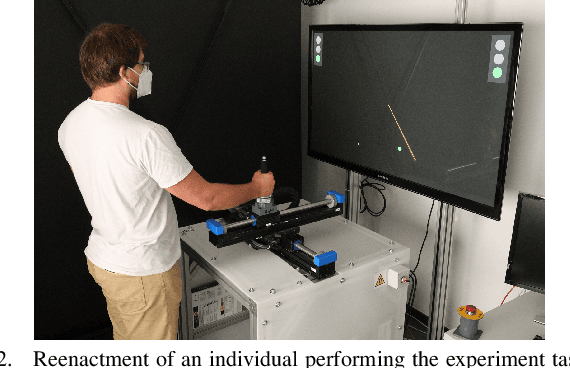
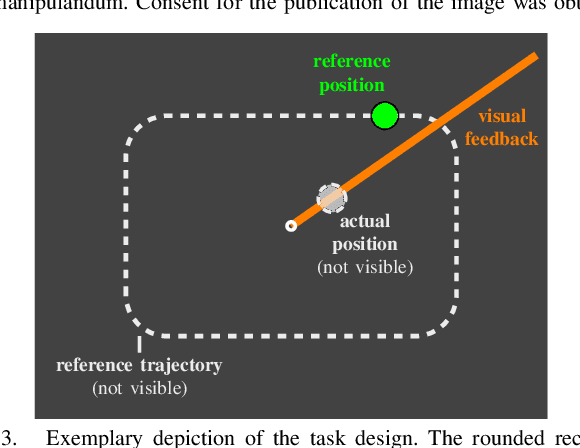
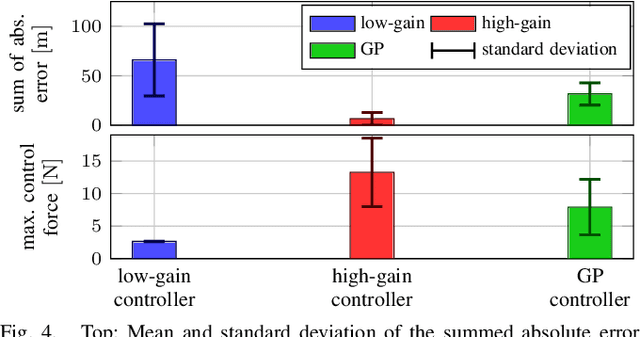
The use of rehabilitation robotics in clinical applications gains increasing importance, due to therapeutic benefits and the ability to alleviate labor-intensive works. However, their practical utility is dependent on the deployment of appropriate control algorithms, which adapt the level of task-assistance according to each individual patient's need. Generally, the required personalization is achieved through manual tuning by clinicians, which is cumbersome and error-prone. In this work we propose a novel online learning control architecture, which is able to personalize the control force at run time to each individual user. To this end, we deploy Gaussian process-based online learning with previously unseen prediction and update rates. Finally, we evaluate our method in an experimental user study, where the learning controller is shown to provide personalized control, while also obtaining safe interaction forces.