 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Rehabilitation Robotics based on Online Learning Control
Paper and Code
Oct 01, 2021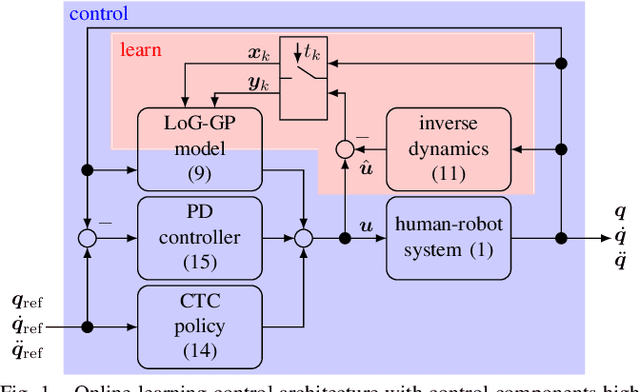
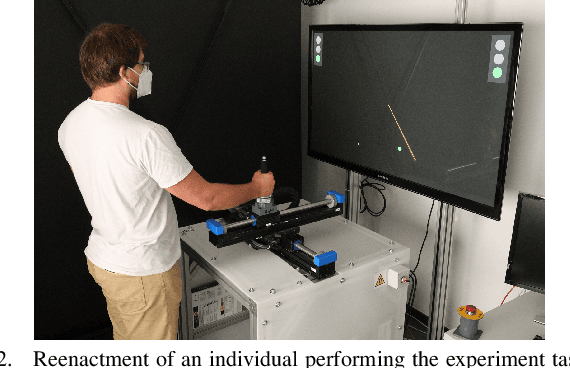
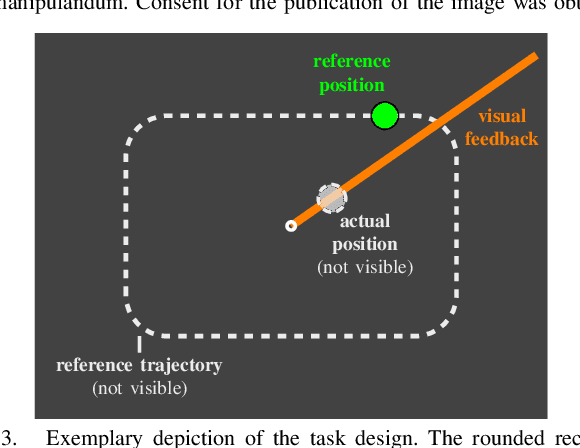
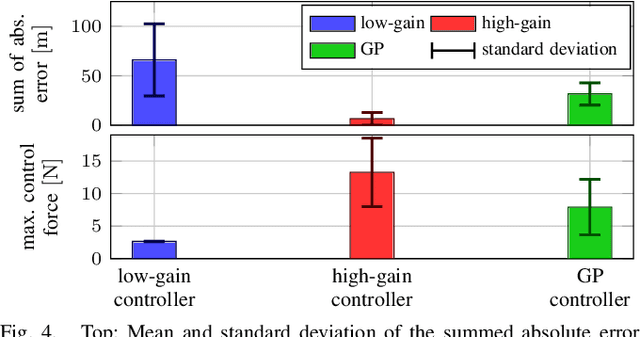
The use of rehabilitation robotics in clinical applications gains increasing importance, due to therapeutic benefits and the ability to alleviate labor-intensive works. However, their practical utility is dependent on the deployment of appropriate control algorithms, which adapt the level of task-assistance according to each individual patient's need. Generally, the required personalization is achieved through manual tuning by clinicians, which is cumbersome and error-prone. In this work we propose a novel online learning control architecture, which is able to personalize the control force at run time to each individual user. To this end, we deploy Gaussian process-based online learning with previously unseen prediction and update rates. Finally, we evaluate our method in an experimental user study, where the learning controller is shown to provide personalized control, while also obtaining safe interaction forces.