 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAG-Plan: Generating Directed Acyclic Dependency Graphs for Dual-Arm Cooperative Planning
Jun 14, 2024Dual-arm robots offer enhanced versatility and efficiency over single-arm counterparts by enabling concurrent manipulation of multiple objects or cooperative execution of tasks using both arms. However, effectively coordinating the two arms for complex long-horizon tasks remains a significant challenge. Existing task planning methods predominantly focus on single-arm robots or rely on predefined bimanual operations, failing to fully leverage the capabilities of dual-arm systems. To address this limitation, we introduce DAG-Plan, a structured task planning framework tailored for dual-arm robots. DAG-Plan harnesses large language models (LLMs) to decompose intricate tasks into actionable sub-tasks represented as nodes within a directed acyclic graph (DAG). Critically, DAG-Plan dynamically assigns these sub-tasks to the appropriate arm based on real-time environmental observations, enabling parallel and adaptive execution. We evaluate DAG-Plan on the novel Dual-Arm Kitchen Benchmark, comprising 9 sequential tasks with 78 sub-tasks and 26 objects. Extensive experiments demonstrate the superiority of DAG-Plan over directly using LLM to generate plans, achieving nearly 50% higher efficiency compared to the single-arm task planning baseline and nearly double the success rate of the dual-arm task planning baseline.
Spiking Neural Network for Ultra-low-latency and High-accurate Object Detection
Jun 27, 2023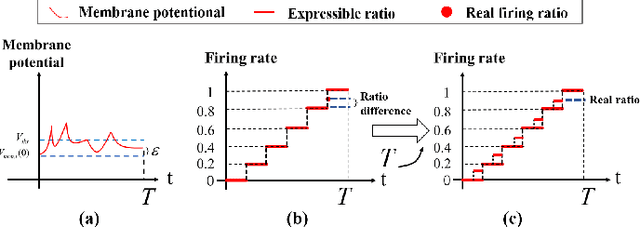
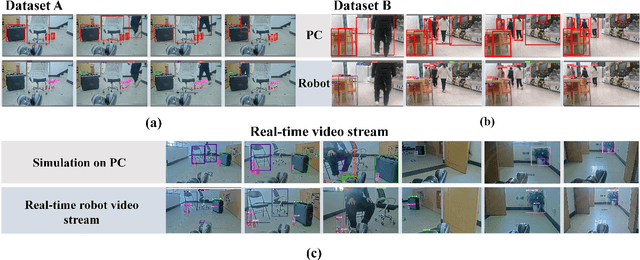
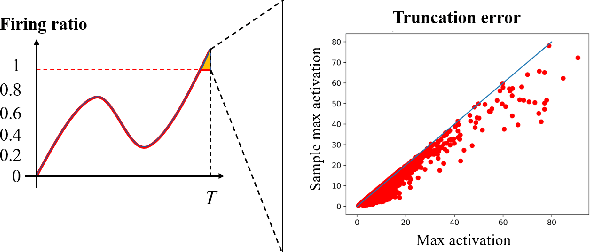
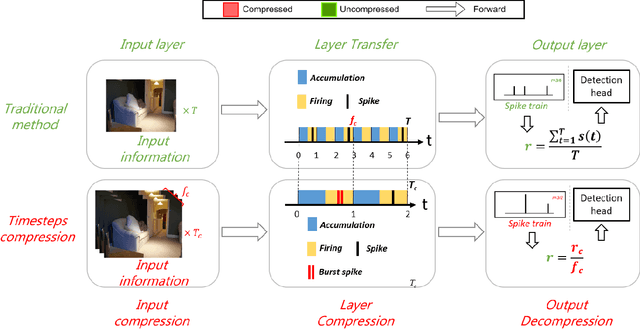
Spiking Neural Networks (SNNs) have garnered widespread interest for their energy efficiency and brain-inspired event-driven properties. While recent methods like Spiking-YOLO have expanded the SNNs to more challenging object detection tasks, they often suffer from high latency and low detection accuracy, making them difficult to deploy on latency sensitive mobile platforms. Furthermore, the conversion method from Artificial Neural Networks (ANNs) to SNNs is hard to maintain the complete structure of the ANNs, resulting in poor feature representation and high conversion errors. To address these challenges, we propose two methods: timesteps compression and spike-time-dependent integrated (STDI) coding. The former reduces the timesteps required in ANN-SNN conversion by compressing information, while the latter sets a time-varying threshold to expand the information holding capacity. We also present a SNN-based ultra-low latency and high accurate object detection model (SUHD) that achieves state-of-the-art performance on nontrivial datasets like PASCAL VOC and MS COCO, with about remarkable 750x fewer timesteps and 30% mean average precision (mAP) improvement, compared to the Spiking-YOLO on MS COCO datasets. To the best of our knowledge, SUHD is the deepest spike-based object detection model to date that achieves ultra low timesteps to complete the lossless conversion.