 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Estimation of Forward Kinematics for an Orthotic Parallel Robotic Mechanism
Mar 14, 2025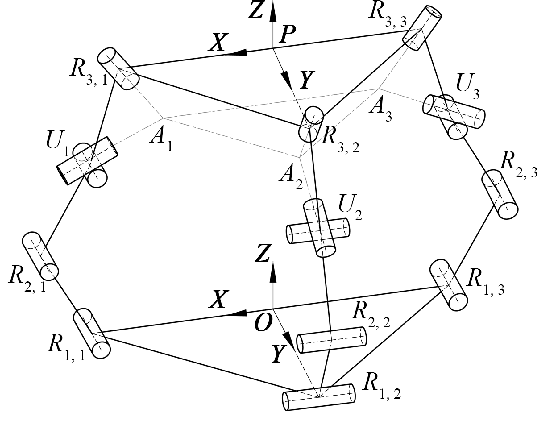
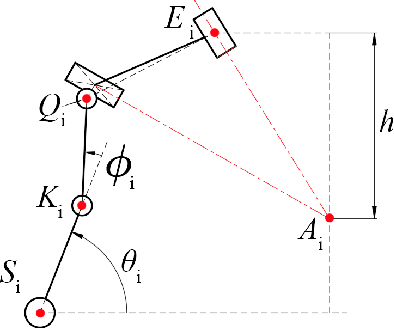
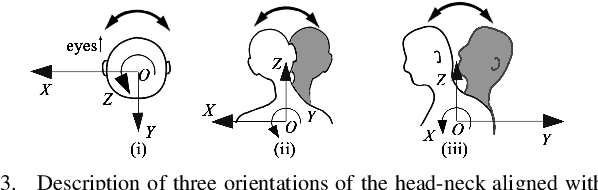
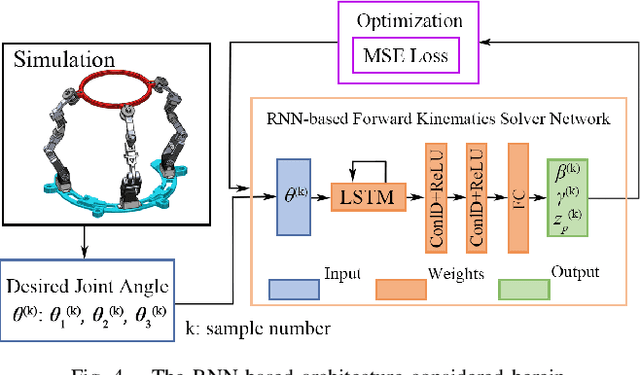
This paper introduces a 3D parallel robot with three identical five-degree-of-freedom chains connected to a circular brace end-effector, aimed to serve as an assistive device for patients with cervical spondylosis. The inverse kinematics of the system is solved analytically, whereas learning-based methods are deployed to solve the forward kinematics. The methods considered herein include a Koopman operator-based approach as well as a neural network-based approach. The task is to predict the position and orientation of end-effector trajectories. The dataset used to train these methods is based on the analytical solutions derived via inverse kinematics. The methods are tested both in simulation and via physical hardware experiments with the developed robot. Results validate the suitability of deploying learning-based methods for studying parallel mechanism forward kinematics that are generally hard to resolve analytically.
Hierarchical Tri-manual Planning for Vision-assisted Fruit Harvesting with Quadrupedal Robots
Sep 25, 2024



This paper addresses the challenge of developing a multi-arm quadrupedal robot capable of efficiently harvesting fruit in complex, natural environments. To overcome the inherent limitations of traditional bimanual manipulation, we introduce the first three-arm quadrupedal robot LocoHarv-3 and propose a novel hierarchical tri-manual planning approach, enabling automated fruit harvesting with collision-free trajectories. Our comprehensive semi-autonomous framework integrates teleoperation, supported by LiDAR-based odometry and mapping, with learning-based visual perception for accurate fruit detection and pose estimation. Validation is conducted through a series of controlled indoor experiments using motion capture and extensive field tests in natural settings. Results demonstrate a 90\% success rate in in-lab settings with a single attempt, and field trials further verify the system's robustness and efficiency in more challenging real-world environments.
Vision-assisted Avocado Harvesting with Aerial Bimanual Manipulation
Aug 17, 2024



Robotic fruit harvesting holds potential in precision agriculture to improve harvesting efficiency. While ground mobile robots are mostly employed in fruit harvesting, certain crops, like avocado trees, cannot be harvested efficiently from the ground alone. This is because of unstructured ground and planting arrangement and high-to-reach fruits. In such cases, aerial robots integrated with manipulation capabilities can pave new ways in robotic harvesting. This paper outlines the design and implementation of a bimanual UAV that employs visual perception and learning to autonomously detect avocados, reach, and harvest them. The dual-arm system comprises a gripper and a fixer arm, to address a key challenge when harvesting avocados: once grasped, a rotational motion is the most efficient way to detach the avocado from the peduncle; however, the peduncle may store elastic energy preventing the avocado from being harvested. The fixer arm aims to stabilize the peduncle, allowing the gripper arm to harvest. The integrated visual perception process enables the detection of avocados and the determination of their pose; the latter is then used to determine target points for a bimanual manipulation planner. Several experiments are conducted to assess the efficacy of each component, and integrated experiments assess the effectiveness of the system.
Design of an End-effector with Application to Avocado Harvesting
Jul 01, 2024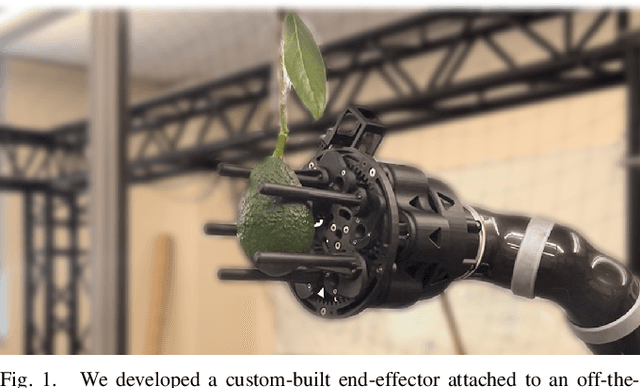
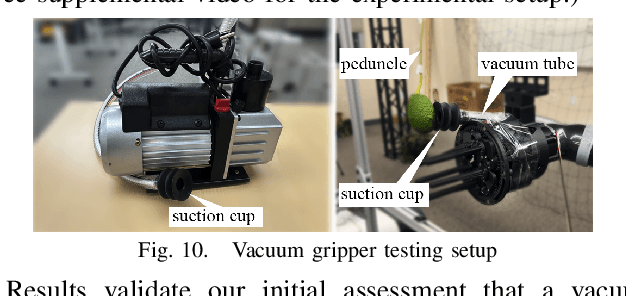
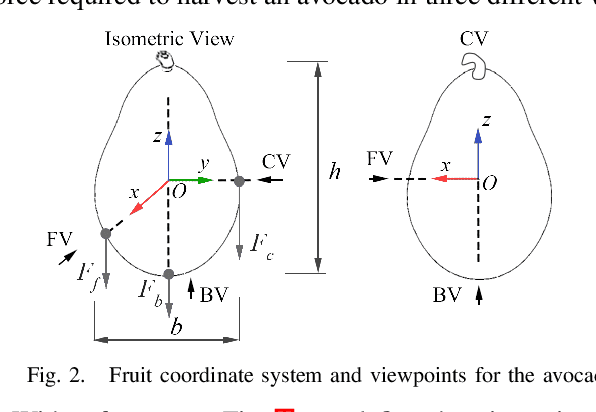
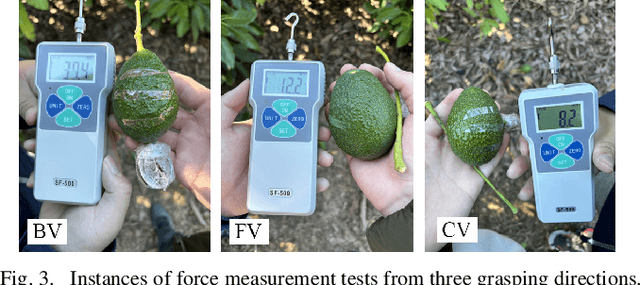
Robot-assisted fruit harvesting has been a critical research direction supporting sustainable crop production. One important determinant of system behavior and efficiency is the end-effector that comes in direct contact with the crop during harvesting and directly affects harvesting success. Harvesting avocados poses unique challenges not addressed by existing end-effectors (namely, they have uneven surfaces and irregular shapes grow on thick peduncles, and have a sturdy calyx attached). The work reported in this paper contributes a new end-effector design suitable for avocado picking. A rigid system design with a two-stage rotational motion is developed, to first grasp the avocado and then detach it from its peduncle. A force analysis is conducted to determine key design parameters. Preliminary experiments demonstrate the efficiency of the developed end-effector to pick and apply a moment to an avocado from a specific viewpoint (as compared to pulling it directly), and in-lab experiments show that the end-effector can grasp and retrieve avocados with a 100% success rate.