 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Estimation of Forward Kinematics for an Orthotic Parallel Robotic Mechanism
Paper and Code
Mar 14, 2025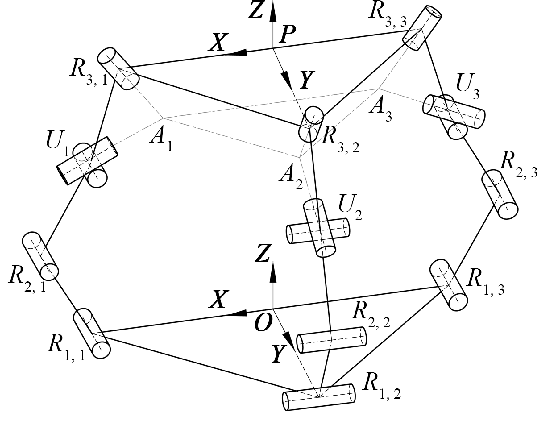
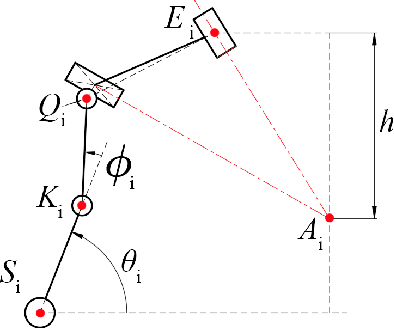
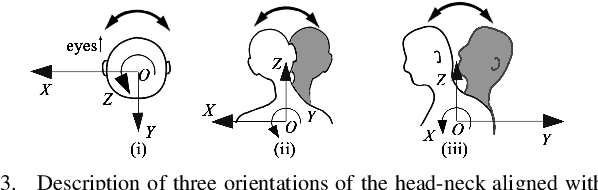
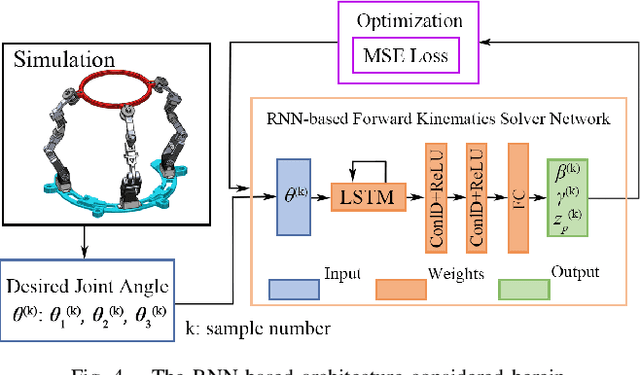
This paper introduces a 3D parallel robot with three identical five-degree-of-freedom chains connected to a circular brace end-effector, aimed to serve as an assistive device for patients with cervical spondylosis. The inverse kinematics of the system is solved analytically, whereas learning-based methods are deployed to solve the forward kinematics. The methods considered herein include a Koopman operator-based approach as well as a neural network-based approach. The task is to predict the position and orientation of end-effector trajectories. The dataset used to train these methods is based on the analytical solutions derived via inverse kinematics. The methods are tested both in simulation and via physical hardware experiments with the developed robot. Results validate the suitability of deploying learning-based methods for studying parallel mechanism forward kinematics that are generally hard to resolve analytically.