 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGHOST: Solving the Traveling Salesman Problem on Graphs of Convex Sets
Nov 13, 2025We study GCS-TSP, a new variant of the Traveling Salesman Problem (TSP) defined over a Graph of Convex Sets (GCS) -- a powerful representation for trajectory planning that decomposes the configuration space into convex regions connected by a sparse graph. In this setting, edge costs are not fixed but depend on the specific trajectory selected through each convex region, making classical TSP methods inapplicable. We introduce GHOST, a hierarchical framework that optimally solves the GCS-TSP by combining combinatorial tour search with convex trajectory optimization. GHOST systematically explores tours on a complete graph induced by the GCS, using a novel abstract-path-unfolding algorithm to compute admissible lower bounds that guide best-first search at both the high level (over tours) and the low level (over feasible GCS paths realizing the tour). These bounds provide strong pruning power, enabling efficient search while avoiding unnecessary convex optimization calls. We prove that GHOST guarantees optimality and present a bounded-suboptimal variant for time-critical scenarios. Experiments show that GHOST is orders-of-magnitude faster than unified mixed-integer convex programming baselines for simple cases and uniquely handles complex trajectory planning problems involving high-order continuity constraints and an incomplete GCS.
Multi-Robot Connected Fermat Spiral Coverage
Mar 20, 2024We introduce the Multi-Robot Connected Fermat Spiral (MCFS), a novel algorithmic framework for Multi-Robot Coverage Path Planning (MCPP) that adapts Connected Fermat Spiral (CFS) from the computer graphics community to multi-robot coordination for the first time. MCFS uniquely enables the orchestration of multiple robots to generate coverage paths that contour around arbitrarily shaped obstacles, a feature that is notably lacking in traditional methods. Our framework not only enhances area coverage and optimizes task performance, particularly in terms of makespan, for workspaces rich in irregular obstacles but also addresses the challenges of path continuity and curvature critical for non-holonomic robots by generating smooth paths without decomposing the workspace. MCFS solves MCPP by constructing a graph of isolines and transforming MCPP into a combinatorial optimization problem, aiming to minimize the makespan while covering all vertices. Our contributions include developing a unified CFS version for scalable and adaptable MCPP, extending it to MCPP with novel optimization techniques for cost reduction and path continuity and smoothness, and demonstrating through extensive experiments that MCFS outperforms existing MCPP methods in makespan, path curvature, coverage ratio, and overlapping ratio. Our research marks a significant step in MCPP, showcasing the fusion of computer graphics and automated planning principles to advance the capabilities of multi-robot systems in complex environments. Our code is available at https://github.com/reso1/MCFS.
Large-Scale Multi-Robot Coverage Path Planning via Local Search
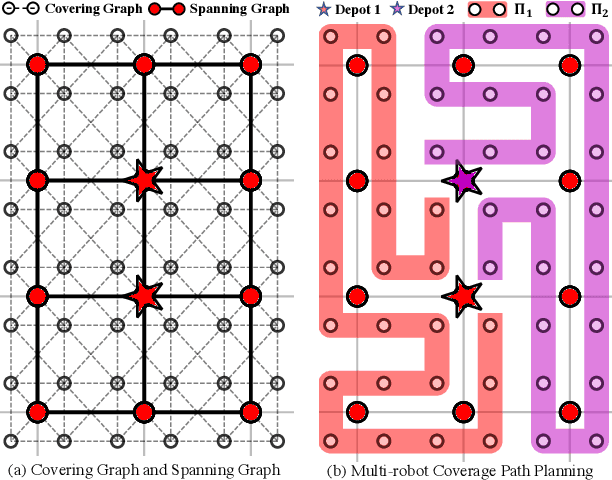
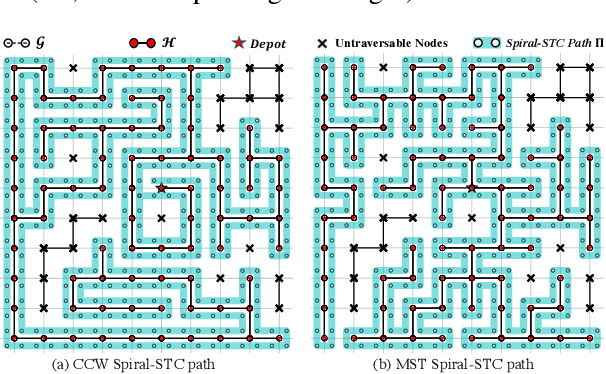
Dec 17, 2023We study graph-based Multi-Robot Coverage Path Planning (MCPP) that aims to compute coverage paths for multiple robots to cover all vertices of a given 2D grid terrain graph $G$. Existing graph-based MCPP algorithms first compute a tree cover on $G$ -- a forest of multiple trees that cover all vertices -- and then employ the Spanning Tree Coverage (STC) paradigm to generate coverage paths on the decomposed graph $D$ of the terrain graph $G$ by circumnavigating the edges of the computed trees, aiming to optimize the makespan (i.e., the maximum coverage path cost among all robots). In this paper, we take a different approach by exploring how to systematically search for good coverage paths directly on $D$. We introduce a new algorithmic framework, called LS-MCPP, which leverages a local search to operate directly on $D$. We propose a novel standalone paradigm, Extended-STC (ESTC), that extends STC to achieve complete coverage for MCPP on any decomposed graphs, even those resulting from incomplete terrain graphs. Furthermore, we demonstrate how to integrate ESTC with three novel types of neighborhood operators into our framework to effectively guide its search process. Our extensive experiments demonstrate the effectiveness of LS-MCPP, consistently improving the initial solution returned by two state-of-the-art baseline algorithms that compute suboptimal tree covers on $G$, with a notable reduction in makespan by up to 35.7\% and 30.3\%, respectively. Moreover, LS-MCPP consistently matches or surpasses the results of optimal tree cover computation, achieving these outcomes with orders of magnitude faster runtime, thereby showcasing its significant benefits for large-scale real-world coverage tasks.
Mixed Integer Programming for Time-Optimal Multi-Robot Coverage Path Planning with Efficient Heuristics
Jun 30, 2023We investigate time-optimal Multi-Robot Coverage Path Planning (MCPP) for both unweighted and weighted terrains, which aims to minimize the coverage time, defined as the maximum travel time of all robots. Specifically, we focus on a reduction from MCPP to Rooted Min-Max Tree Cover (RMMTC). For the first time, we propose a Mixed Integer Programming (MIP) model to optimally solve RMMTC, resulting in an MCPP solution with a coverage time that is provably at most four times the optimal. Moreover, we propose two suboptimal yet effective heuristics that reduce the number of variables in the MIP model, thus improving its efficiency for large-scale MCPP instances. We show that both heuristics result in reduced-size MIP models that remain complete (i.e., guarantee to find a solution if one exists) for all RMMTC instances. Additionally, we explore the use of model optimization warm-startup to further improve the efficiency of both the original MIP model and the reduced-size MIP models. We validate the effectiveness of our MIP-based MCPP planner through experiments that compare it with two state-of-the-art MCPP planners on various instances, demonstrating a reduction in the coverage time by an average of 42.42% and 39.16% over them, respectively.
TMSTC*: A Turn-minimizing Algorithm For Multi-robot Coverage Path Planning
Dec 05, 2022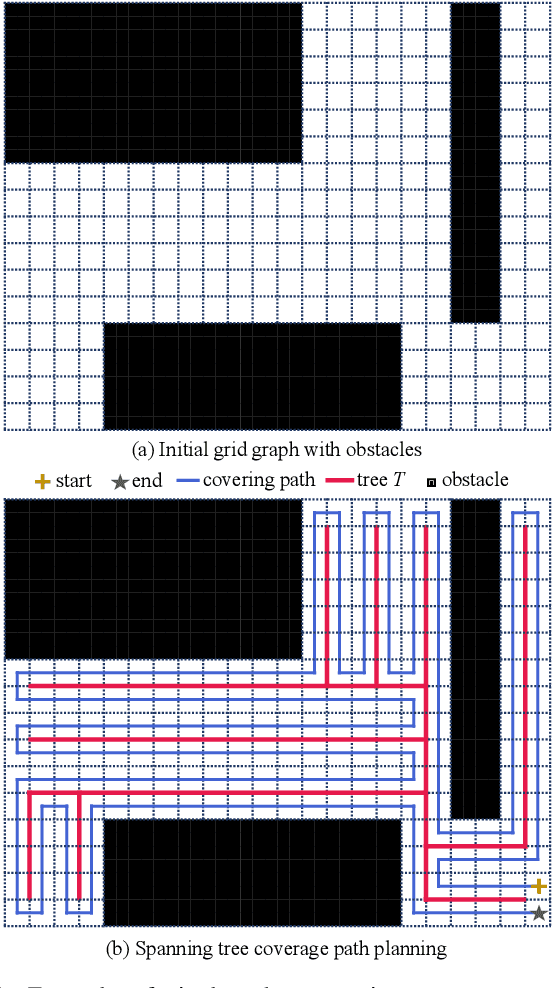
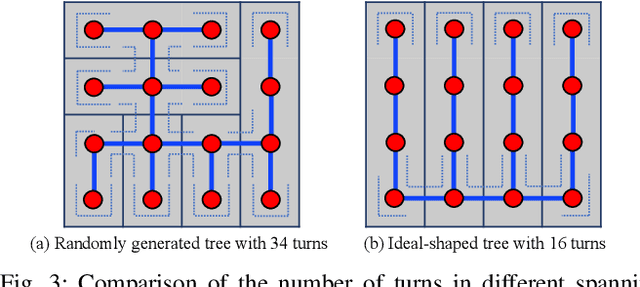
Coverage path planning is a major application for mobile robots, which requires robots to move along a planned path to cover the entire map. For large-scale tasks, coverage path planning benefits greatly from multiple robots. In this paper, we describe Turn-minimizing Multirobot Spanning Tree Coverage Star(TMSTC*), an improved multirobot coverage path planning (mCPP) algorithm based on the MSTC*. Our algorithm partitions the map into minimum bricks as tree's branches and thereby transforms the problem into finding the maximum independent set of bipartite graph. We then connect bricks with greedy strategy to form a tree, aiming to reduce the number of turns of corresponding circumnavigating coverage path. Our experimental results show that our approach enables multiple robots to make fewer turns and thus complete terrain coverage tasks faster than other popular algorithms.
Learning to Coordinate for a Worker-Station Multi-robot System in Planar Coverage Tasks
Aug 05, 2022
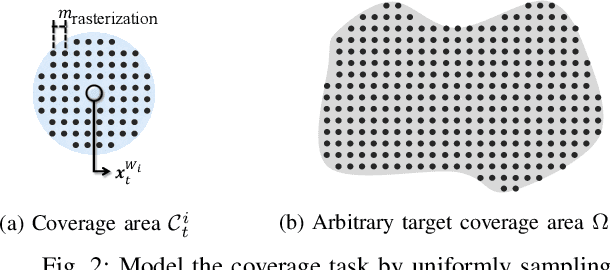
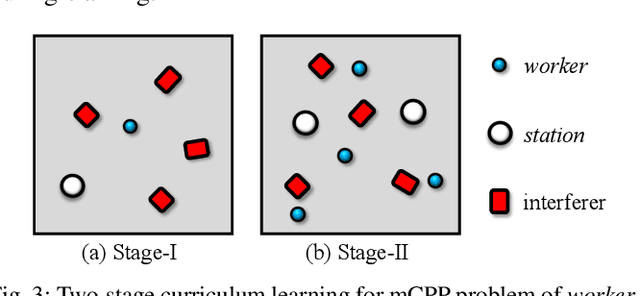
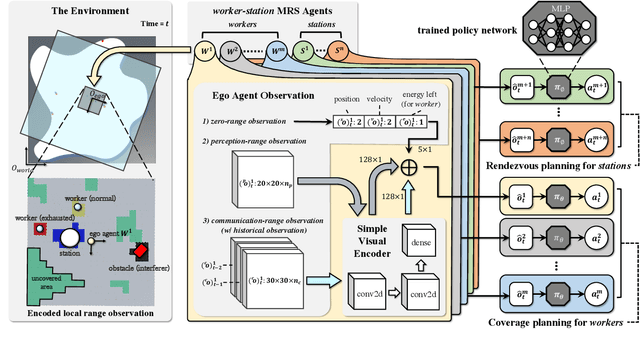
For massive large-scale tasks, a multi-robot system (MRS) can effectively improve efficiency by utilizing each robot's different capabilities, mobility, and functionality. In this paper, we focus on the multi-robot coverage path planning (mCPP) problem in large-scale planar areas with random dynamic interferers in the environment, where the robots have limited resources. We introduce a worker-station MRS consisting of multiple workers with limited resources for actual work, and one station with enough resources for resource replenishment. We aim to solve the mCPP problem for the worker-station MRS by formulating it as a fully cooperative multi-agent reinforcement learning problem. Then we propose an end-to-end decentralized online planning method, which simultaneously solves coverage planning for workers and rendezvous planning for station. Our method manages to reduce the influence of random dynamic interferers on planning, while the robots can avoid collisions with them. We conduct simulation and real robot experiments, and the comparison results show that our method has competitive performance in solving the mCPP problem for worker-station MRS in metric of task finish time.
MSTC*:Multi-robot Coverage Path Planning under Physical Constraints
Aug 10, 2021
For large-scale tasks, coverage path planning (CPP) can benefit greatly from multiple robots. In this paper, we present an efficient algorithm MSTC* for multi-robot coverage path planning (mCPP) based on spiral spanning tree coverage (Spiral-STC). Our algorithm incorporates strict physical constraints like terrain traversability and material load capacity. We compare our algorithm against the state-of-the-art in mCPP for regular grid maps and real field terrains in simulation environments. The experimental results show that our method significantly outperforms existing spiral-STC based mCPP methods. Our algorithm can find a set of well-balanced workload distributions for all robots and therefore, achieve the overall minimum time to complete the coverage.