 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSTC*:Multi-robot Coverage Path Planning under Physical Constraints
Aug 10, 2021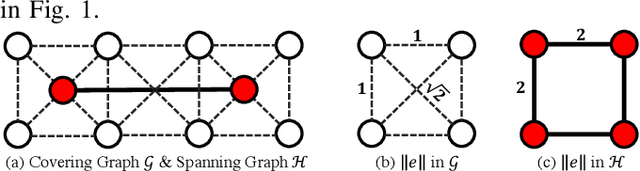
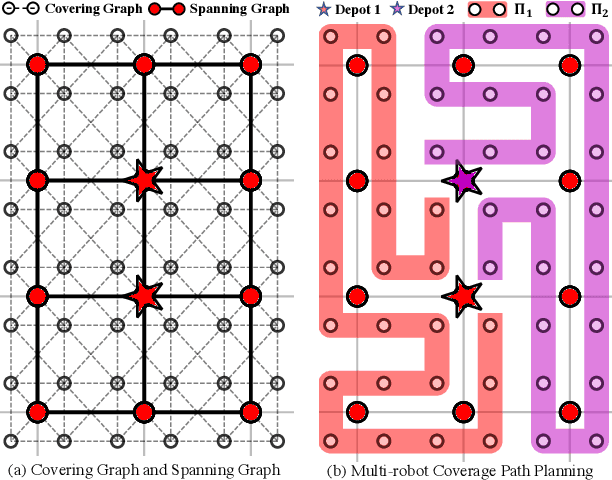
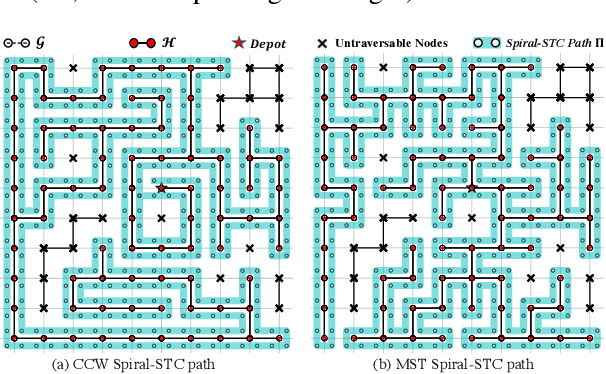
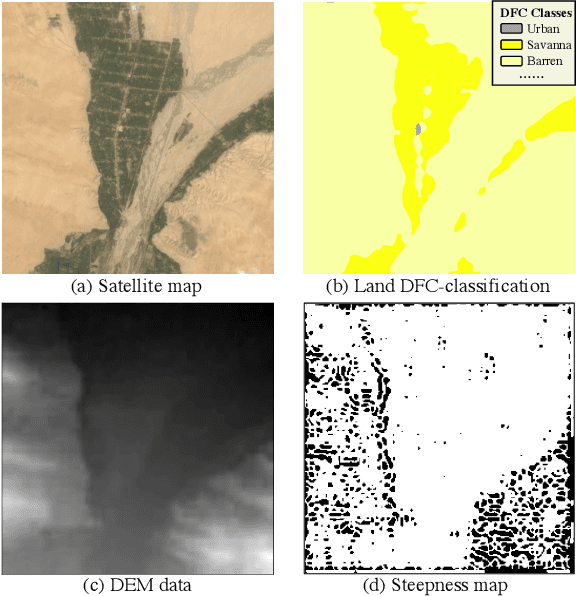
For large-scale tasks, coverage path planning (CPP) can benefit greatly from multiple robots. In this paper, we present an efficient algorithm MSTC* for multi-robot coverage path planning (mCPP) based on spiral spanning tree coverage (Spiral-STC). Our algorithm incorporates strict physical constraints like terrain traversability and material load capacity. We compare our algorithm against the state-of-the-art in mCPP for regular grid maps and real field terrains in simulation environments. The experimental results show that our method significantly outperforms existing spiral-STC based mCPP methods. Our algorithm can find a set of well-balanced workload distributions for all robots and therefore, achieve the overall minimum time to complete the coverage.