 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTMSTC*: A Turn-minimizing Algorithm For Multi-robot Coverage Path Planning
Paper and Code
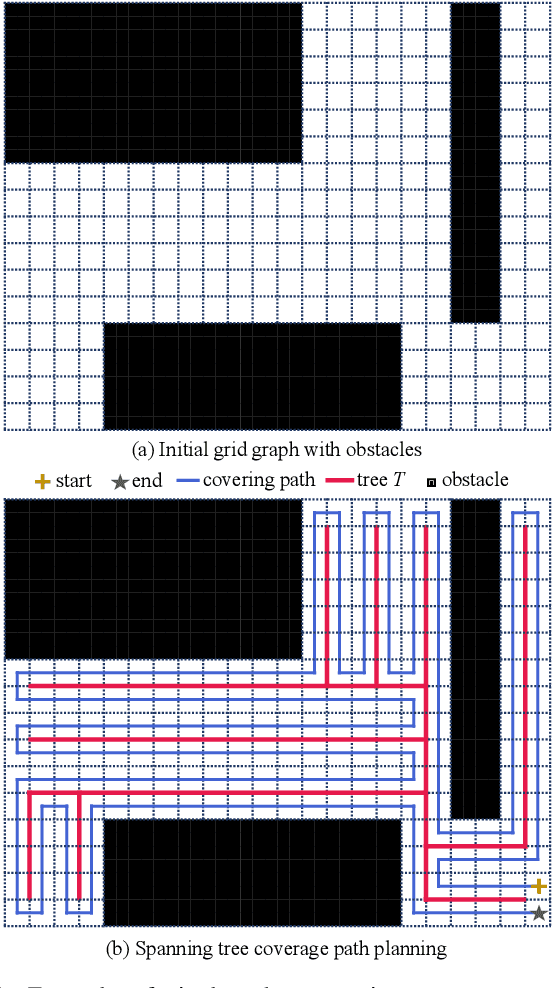
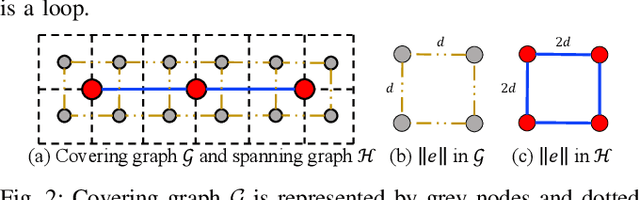
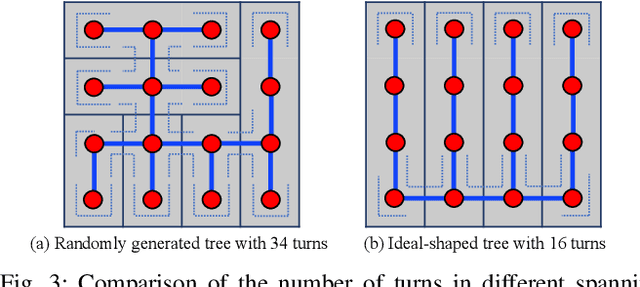
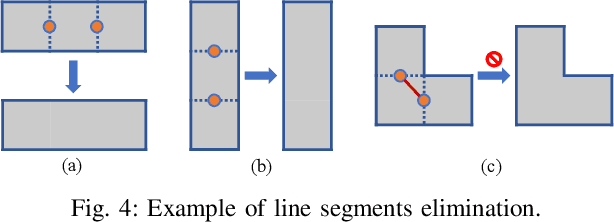
Coverage path planning is a major application for mobile robots, which requires robots to move along a planned path to cover the entire map. For large-scale tasks, coverage path planning benefits greatly from multiple robots. In this paper, we describe Turn-minimizing Multirobot Spanning Tree Coverage Star(TMSTC*), an improved multirobot coverage path planning (mCPP) algorithm based on the MSTC*. Our algorithm partitions the map into minimum bricks as tree's branches and thereby transforms the problem into finding the maximum independent set of bipartite graph. We then connect bricks with greedy strategy to form a tree, aiming to reduce the number of turns of corresponding circumnavigating coverage path. Our experimental results show that our approach enables multiple robots to make fewer turns and thus complete terrain coverage tasks faster than other popular algorithms.