 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVolumetric-based Contact Point Detection for 7-DoF Grasping
Sep 14, 2022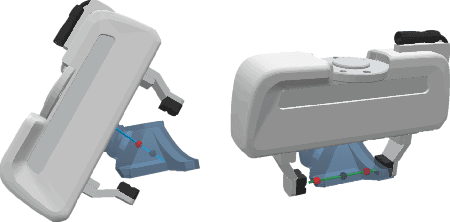
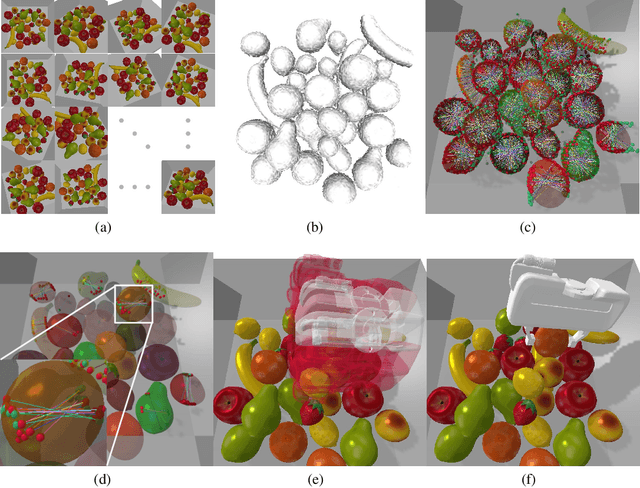
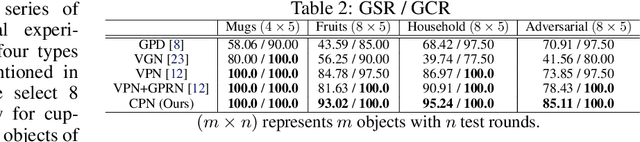
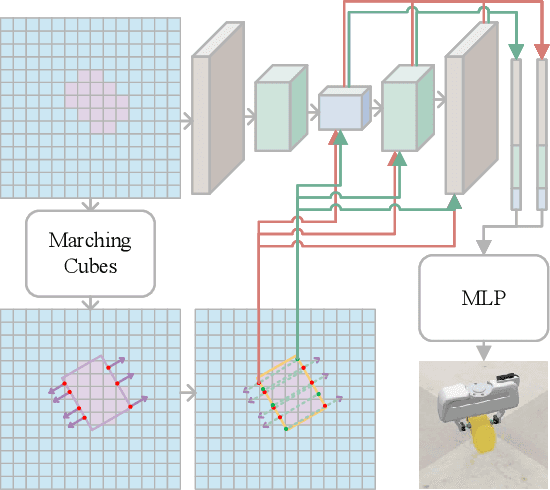
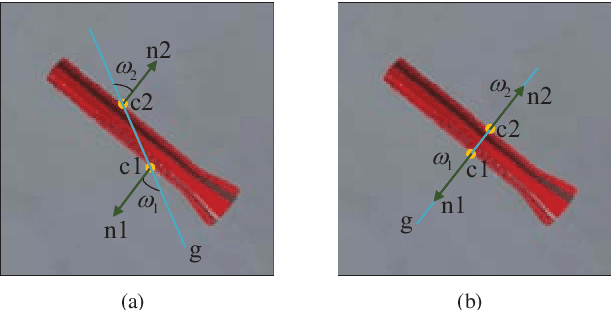
In this paper, we propose a novel grasp pipeline based on contact point detection on the truncated signed distance function (TSDF) volume to achieve closed-loop 7-degree-of-freedom (7-DoF) grasping on cluttered environments. The key aspects of our method are that 1) the proposed pipeline exploits the TSDF volume in terms of multi-view fusion, contact-point sampling and evaluation, and collision checking, which provides reliable and collision-free 7-DoF gripper poses with real-time performance; 2) the contact-based pose representation effectively eliminates the ambiguity introduced by the normal-based methods, which provides a more precise and flexible solution. Extensive simulated and real-robot experiments demonstrate that the proposed pipeline can select more antipodal and stable grasp poses and outperforms normal-based baselines in terms of the grasp success rate in both simulated and physical scenarios.
Deep learning-based framework for cardiac function assessment in embryonic zebrafish from heart beating videos
Feb 24, 2021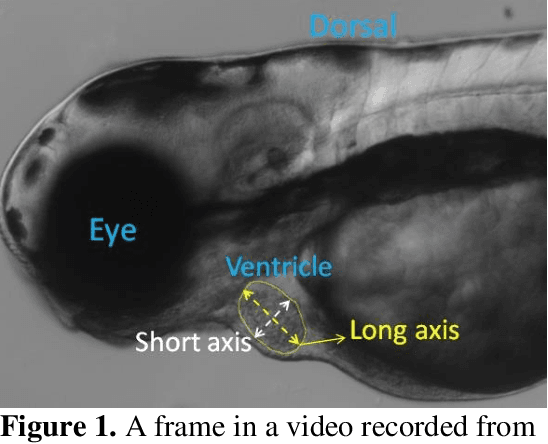
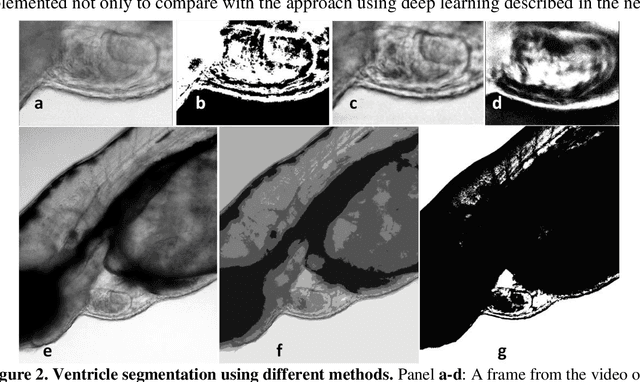
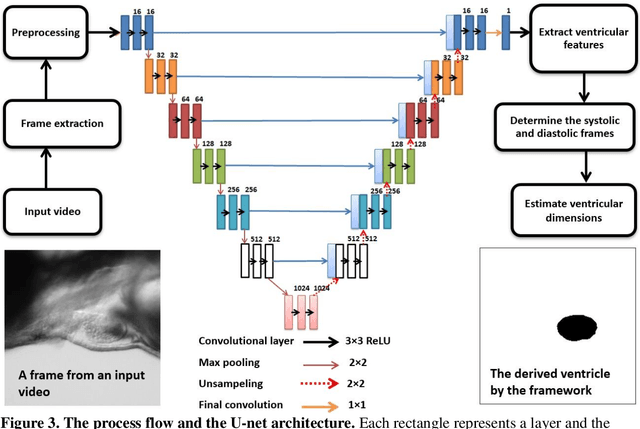
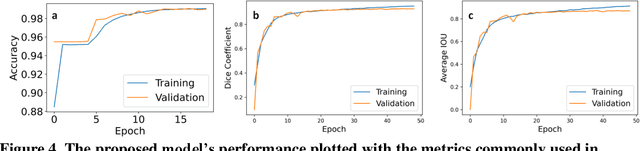
Zebrafish is a powerful and widely-used model system for a host of biological investigations including cardiovascular studies and genetic screening. Zebrafish are readily assessable during developmental stages; however, the current methods for quantification and monitoring of cardiac functions mostly involve tedious manual work and inconsistent estimations. In this paper, we developed and validated a Zebrafish Automatic Cardiovascular Assessment Framework (ZACAF) based on a U-net deep learning model for automated assessment of cardiovascular indices, such as ejection fraction (EF) and fractional shortening (FS) from microscopic videos of wildtype and cardiomyopathy mutant zebrafish embryos. Our approach yielded favorable performance with accuracy above 90% compared with manual processing. We used only black and white regular microscopic recordings with frame rates of 5-20 frames per second (fps); thus, the framework could be widely applicable with any laboratory resources and infrastructure. Most importantly, the automatic feature holds promise to enable efficient, consistent and reliable processing and analysis capacity for large amounts of videos, which can be generated by diverse collaborating teams.
MetaGrasp: Data Efficient Grasping by Affordance Interpreter Network
Feb 23, 2019
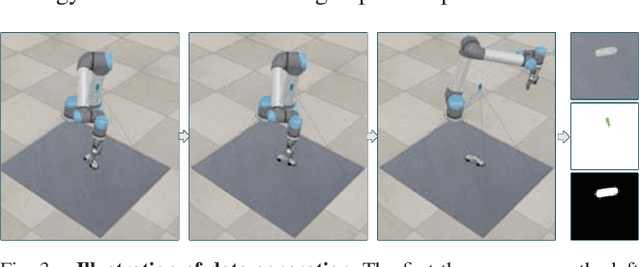
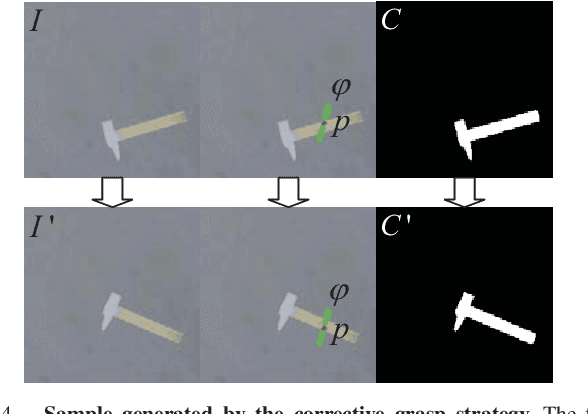
Data-driven approach for grasping shows significant advance recently. But these approaches usually require much training data. To increase the efficiency of grasping data collection, this paper presents a novel grasp training system including the whole pipeline from data collection to model inference. The system can collect effective grasp sample with a corrective strategy assisted by antipodal grasp rule, and we design an affordance interpreter network to predict pixelwise grasp affordance map. We define graspability, ungraspability and background as grasp affordances. The key advantage of our system is that the pixel-level affordance interpreter network trained with only a small number of grasp samples under antipodal rule can achieve significant performance on totally unseen objects and backgrounds. The training sample is only collected in simulation. Extensive qualitative and quantitative experiments demonstrate the accuracy and robustness of our proposed approach. In the real-world grasp experiments, we achieve a grasp success rate of 93% on a set of household items and 91% on a set of adversarial items with only about 6,300 simulated samples. We also achieve 87% accuracy in clutter scenario. Although the model is trained using only RGB image, when changing the background textures, it also performs well and can achieve even 94% accuracy on the set of adversarial objects, which outperforms current state-of-the-art methods.