 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVolumetric-based Contact Point Detection for 7-DoF Grasping
Sep 14, 2022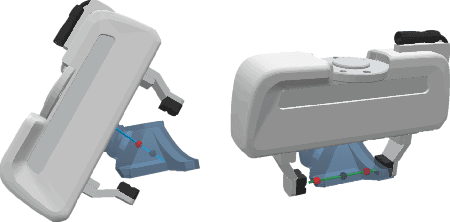
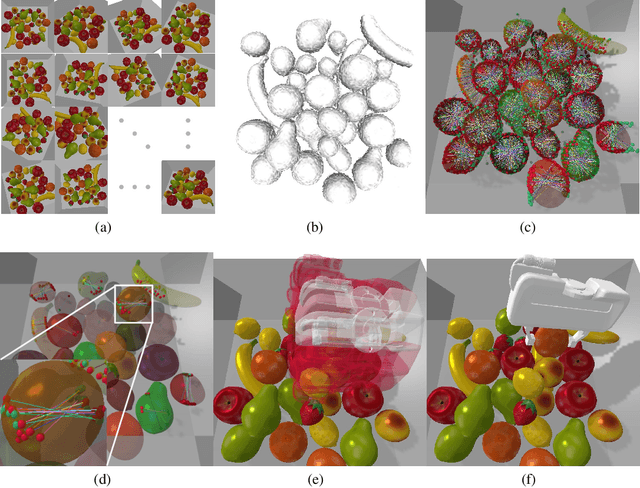
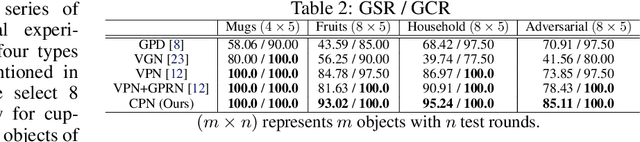
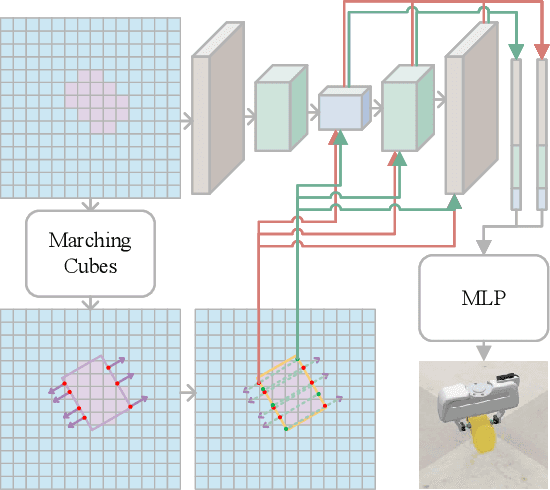
In this paper, we propose a novel grasp pipeline based on contact point detection on the truncated signed distance function (TSDF) volume to achieve closed-loop 7-degree-of-freedom (7-DoF) grasping on cluttered environments. The key aspects of our method are that 1) the proposed pipeline exploits the TSDF volume in terms of multi-view fusion, contact-point sampling and evaluation, and collision checking, which provides reliable and collision-free 7-DoF gripper poses with real-time performance; 2) the contact-based pose representation effectively eliminates the ambiguity introduced by the normal-based methods, which provides a more precise and flexible solution. Extensive simulated and real-robot experiments demonstrate that the proposed pipeline can select more antipodal and stable grasp poses and outperforms normal-based baselines in terms of the grasp success rate in both simulated and physical scenarios.