 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Predictive Control of Blood Suction for Surgical Hemostasis using Differentiable Fluid Simulations
Feb 02, 2021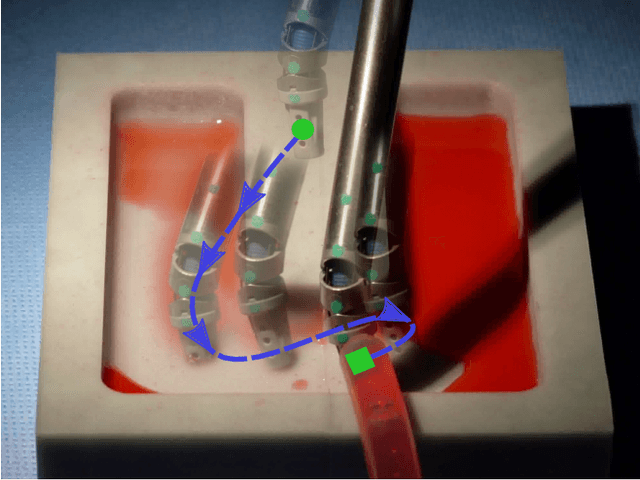
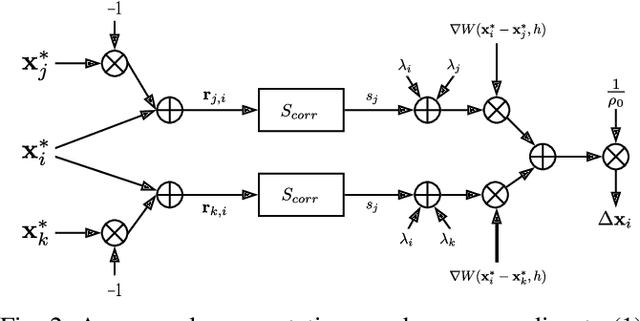
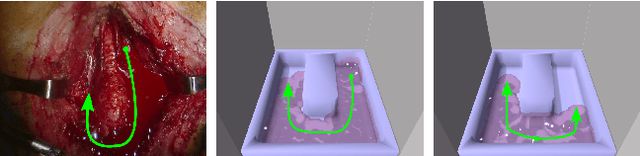
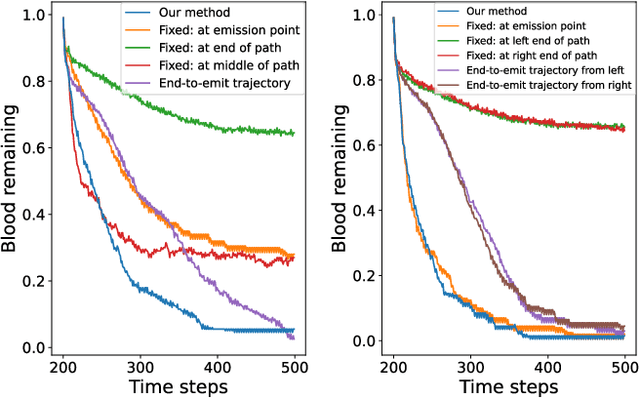
Recent developments in surgical robotics have led to new advancements in the automation of surgical sub-tasks such as suturing, soft tissue manipulation, tissue tensioning and cutting. However, integration of dynamics to optimize these control policies for the variety of scenes encountered in surgery remains unsolved. Towards this effort, we investigate the integration of differentiable fluid dynamics to optimizing a suction tool's trajectory to clear the surgical field from blood as fast as possible. The fully differentiable fluid dynamics is integrated with a novel suction model for effective model predictive control of the tool. The differentiability of the fluid model is crucial because we utilize the gradients of the fluid states with respect to the suction tool position to optimize the trajectory. Through a series of experiments, we demonstrate how, by incorporating fluid models, the trajectories generated by our method can perform as good as or better than handcrafted human-intuitive suction policies. We also show that our method is adaptable and can work in different cavity conditions while using a single handcrafted strategy fails.
Autonomous Robotic Suction to Clear the Surgical Field for Hemostasis using Image-based Blood Flow Detection
Oct 16, 2020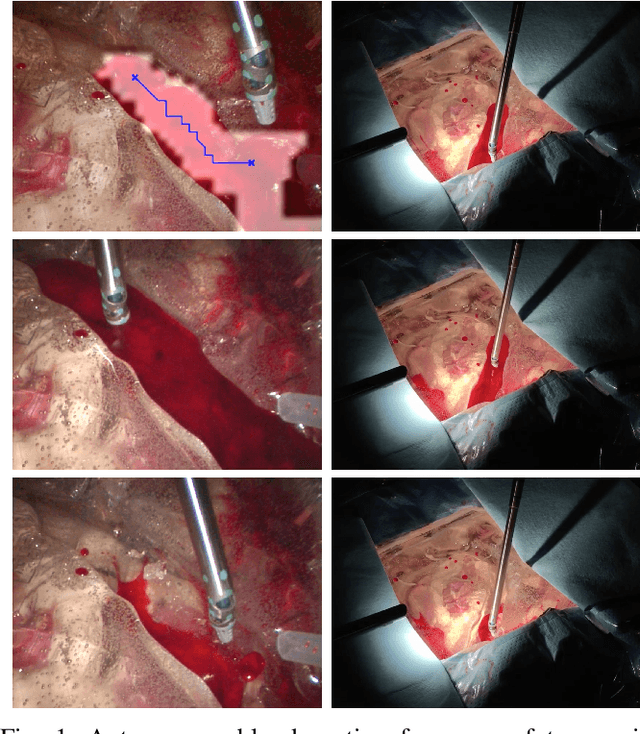
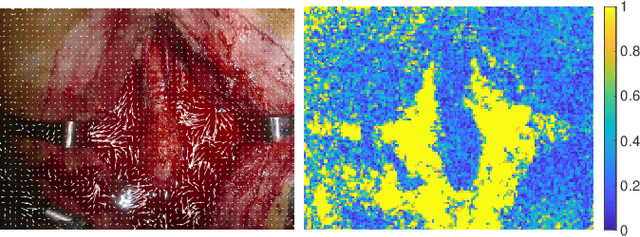
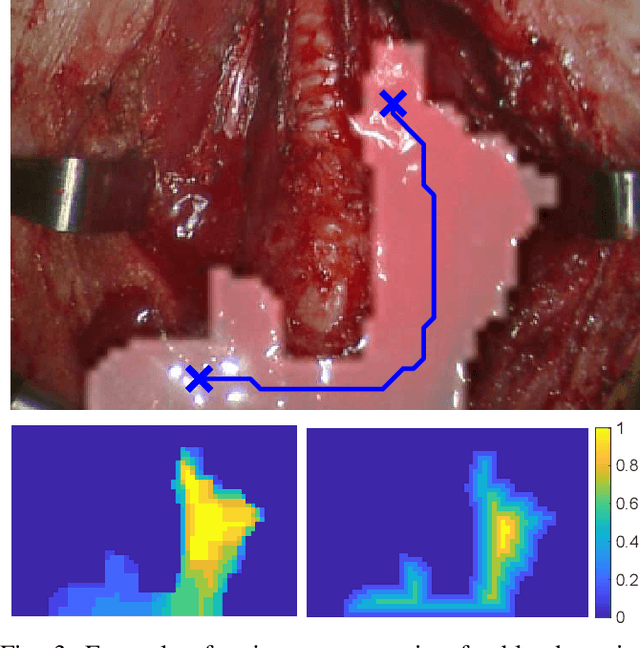

Autonomous robotic surgery has seen significant progression over the last decade with the aims of reducing surgeon fatigue, improving procedural consistency, and perhaps one day take over surgery itself. However, automation has not been applied to the critical surgical task of controlling tissue and blood vessel bleeding--known as hemostasis. The task of hemostasis covers a spectrum of bleeding sources and a range of blood velocity, trajectory, and volume. In an extreme case, an un-controlled blood vessel fills the surgical field with flowing blood. In this work, we present the first, automated solution for hemostasis through development of a novel probabilistic blood flow detection algorithm and a trajectory generation technique that guides autonomous suction tools towards pooling blood. The blood flow detection algorithm is tested in both simulated scenes and in a real-life trauma scenario involving a hemorrhage that occurred during thyroidectomy. The complete solution is tested in a physical lab setting with the da Vinci Research Kit (dVRK) and a simulated surgical cavity for blood to flow through. The results show that our automated solution has accurate detection, a fast reaction time, and effective removal of the flowing blood. Therefore, the proposed methods are powerful tools to clearing the surgical field which can be followed by either a surgeon or future robotic automation developments to close the vessel rupture.