 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Predictive Control of Blood Suction for Surgical Hemostasis using Differentiable Fluid Simulations
Paper and Code
Feb 02, 2021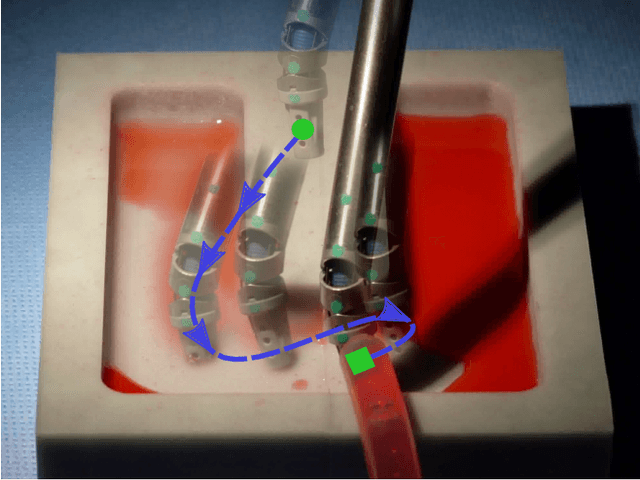
Recent developments in surgical robotics have led to new advancements in the automation of surgical sub-tasks such as suturing, soft tissue manipulation, tissue tensioning and cutting. However, integration of dynamics to optimize these control policies for the variety of scenes encountered in surgery remains unsolved. Towards this effort, we investigate the integration of differentiable fluid dynamics to optimizing a suction tool's trajectory to clear the surgical field from blood as fast as possible. The fully differentiable fluid dynamics is integrated with a novel suction model for effective model predictive control of the tool. The differentiability of the fluid model is crucial because we utilize the gradients of the fluid states with respect to the suction tool position to optimize the trajectory. Through a series of experiments, we demonstrate how, by incorporating fluid models, the trajectories generated by our method can perform as good as or better than handcrafted human-intuitive suction policies. We also show that our method is adaptable and can work in different cavity conditions while using a single handcrafted strategy fails.