 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Black-Box to White-Box: Control-Theoretic Neural Network Interpretability
Nov 17, 2025Deep neural networks achieve state of the art performance but remain difficult to interpret mechanistically. In this work, we propose a control theoretic framework that treats a trained neural network as a nonlinear state space system and uses local linearization, controllability and observability Gramians, and Hankel singular values to analyze its internal computation. For a given input, we linearize the network around the corresponding hidden activation pattern and construct a state space model whose state consists of hidden neuron activations. The input state and state output Jacobians define local controllability and observability Gramians, from which we compute Hankel singular values and associated modes. These quantities provide a principled notion of neuron and pathway importance: controllability measures how easily each neuron can be excited by input perturbations, observability measures how strongly each neuron influences the output, and Hankel singular values rank internal modes that carry input output energy. We illustrate the framework on simple feedforward networks, including a 1 2 2 1 SwiGLU network and a 2 3 3 2 GELU network. By comparing different operating points, we show how activation saturation reduces controllability, shrinks the dominant Hankel singular value, and shifts the dominant internal mode to a different subset of neurons. The proposed method turns a neural network into a collection of local white box dynamical models and suggests which internal directions are natural candidates for pruning or constraints to improve interpretability.
Role of Sensing and Computer Vision in 6G Wireless Communications
May 07, 2024Recently, we are witnessing the remarkable progress and widespread adoption of sensing technologies in autonomous driving, robotics, and metaverse. Considering the rapid advancement of computer vision (CV) technology to analyze the sensing information, we anticipate a proliferation of wireless applications exploiting the sensing and CV technologies in 6G. In this article, we provide a holistic overview of the sensing and CV-aided wireless communications (SVWC) framework for 6G. By analyzing the high-resolution sensing information through the powerful CV techniques, SVWC can quickly and accurately understand the wireless environments and then perform the wireless tasks. To demonstrate the efficacy of SVWC, we design the whole process of SVWC including the sensing dataset collection, DL model training, and execution of realistic wireless tasks. From the numerical evaluations on 6G communication scenarios, we show that SVWC achieves considerable performance gains over the conventional 5G systems in terms of positioning accuracy, data rate, and access latency.
A Multi-stage Framework with Mean Subspace Computation and Recursive Feedback for Online Unsupervised Domain Adaptation
Jun 24, 2022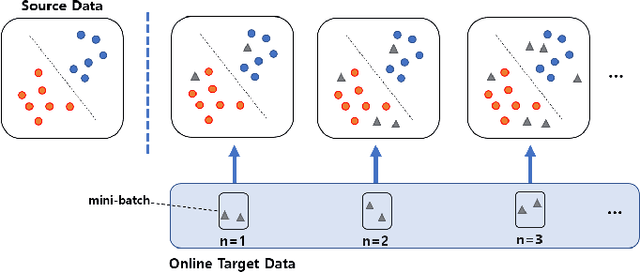
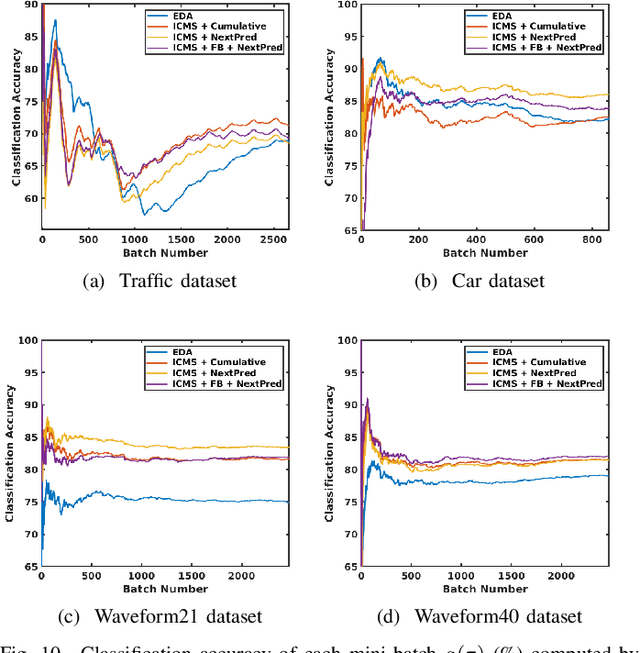
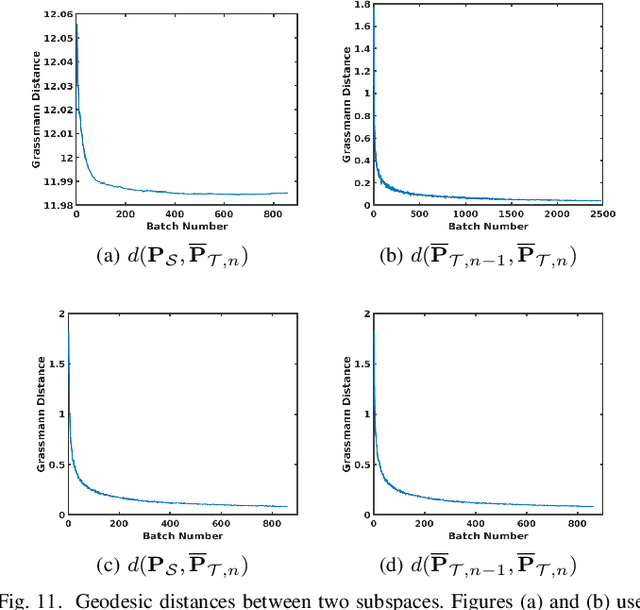
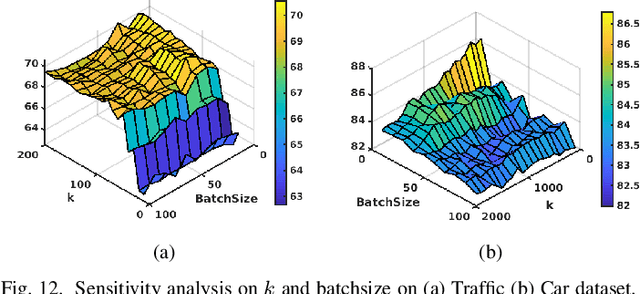
In this paper, we address the Online Unsupervised Domain Adaptation (OUDA) problem and propose a novel multi-stage framework to solve real-world situations when the target data are unlabeled and arriving online sequentially in batches. To project the data from the source and the target domains to a common subspace and manipulate the projected data in real-time, our proposed framework institutes a novel method, called an Incremental Computation of Mean-Subspace (ICMS) technique, which computes an approximation of mean-target subspace on a Grassmann manifold and is proven to be a close approximate to the Karcher mean. Furthermore, the transformation matrix computed from the mean-target subspace is applied to the next target data in the recursive-feedback stage, aligning the target data closer to the source domain. The computation of transformation matrix and the prediction of next-target subspace leverage the performance of the recursive-feedback stage by considering the cumulative temporal dependency among the flow of the target subspace on the Grassmann manifold. The labels of the transformed target data are predicted by the pre-trained source classifier, then the classifier is updated by the transformed data and predicted labels. Extensive experiments on six datasets were conducted to investigate in depth the effect and contribution of each stage in our proposed framework and its performance over previous approaches in terms of classification accuracy and computational speed. In addition, the experiments on traditional manifold-based learning models and neural-network-based learning models demonstrated the applicability of our proposed framework for various types of learning models.