 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Optimal Adversarial Robust Reinforcement Learning with Infinity Measurement Error
Feb 23, 2025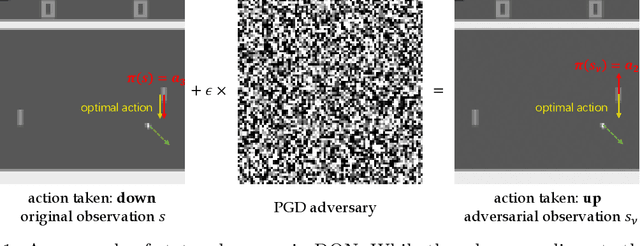


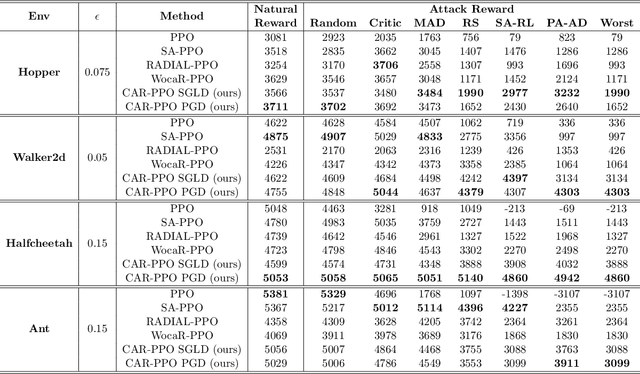
Ensuring the robustness of deep reinforcement learning (DRL) agents against adversarial attacks is critical for their trustworthy deployment. Recent research highlights the challenges of achieving state-adversarial robustness and suggests that an optimal robust policy (ORP) does not always exist, complicating the enforcement of strict robustness constraints. In this paper, we further explore the concept of ORP. We first introduce the Intrinsic State-adversarial Markov Decision Process (ISA-MDP), a novel formulation where adversaries cannot fundamentally alter the intrinsic nature of state observations. ISA-MDP, supported by empirical and theoretical evidence, universally characterizes decision-making under state-adversarial paradigms. We rigorously prove that within ISA-MDP, a deterministic and stationary ORP exists, aligning with the Bellman optimal policy. Our findings theoretically reveal that improving DRL robustness does not necessarily compromise performance in natural environments. Furthermore, we demonstrate the necessity of infinity measurement error (IME) in both $Q$-function and probability spaces to achieve ORP, unveiling vulnerabilities of previous DRL algorithms that rely on $1$-measurement errors. Motivated by these insights, we develop the Consistent Adversarial Robust Reinforcement Learning (CAR-RL) framework, which optimizes surrogates of IME. We apply CAR-RL to both value-based and policy-based DRL algorithms, achieving superior performance and validating our theoretical analysis.
SAMBO-RL: Shifts-aware Model-based Offline Reinforcement Learning
Aug 23, 2024Model-based Offline Reinforcement Learning trains policies based on offline datasets and model dynamics, without direct real-world environment interactions. However, this method is inherently challenged by distribution shift. Previous approaches have primarily focused on tackling this issue directly leveraging off-policy mechanisms and heuristic uncertainty in model dynamics, but they resulted in inconsistent objectives and lacked a unified theoretical foundation. This paper offers a comprehensive analysis that disentangles the problem into two key components: model bias and policy shift. We provide both theoretical insights and empirical evidence to demonstrate how these factors lead to inaccuracies in value function estimation and impose implicit restrictions on policy learning. To address these challenges, we derive adjustment terms for model bias and policy shift within a unified probabilistic inference framework. These adjustments are seamlessly integrated into the vanilla reward function to create a novel Shifts-aware Reward (SAR), aiming at refining value learning and facilitating policy training. Furthermore, we introduce Shifts-aware Model-based Offline Reinforcement Learning (SAMBO-RL), a practical framework that efficiently trains classifiers to approximate the SAR for policy optimization. Empirically, we show that SAR effectively mitigates distribution shift, and SAMBO-RL demonstrates superior performance across various benchmarks, underscoring its practical effectiveness and validating our theoretical analysis.