 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Navigation at the Nano-Scale: Algorithms, Architectures, and Constraints
Jan 19, 2026Autonomous navigation for nano-scale unmanned aerial vehicles (nano-UAVs) is governed by extreme Size, Weight, and Power (SWaP) constraints (with the weight < 50 g and sub-100 mW onboard processor), distinguishing it fundamentally from standard robotic paradigms. This review synthesizes the state-of-the-art in sensing, computing, and control architectures designed specifically for these sub- 100mW computational envelopes. We critically analyse the transition from classical geometry-based methods to emerging "Edge AI" paradigms, including quantized deep neural networks deployed on ultra-low-power System-on-Chips (SoCs) and neuromorphic event-based control. Beyond algorithms, we evaluate the hardware-software co-design requisite for autonomy, covering advancements in dense optical flow, optimized Simultaneous Localization and Mapping (SLAM), and learning-based flight control. While significant progress has been observed in visual navigation and relative pose estimation, our analysis reveals persistent gaps in long-term endurance, robust obstacle avoidance in dynamic environments, and the "Sim-to-Real" transfer of reinforcement learning policies. This survey provides a roadmap for bridging these gaps, advocating for hybrid architectures that fuse lightweight classical control with data-driven perception to enable fully autonomous, agile nano-UAVs in GPS-denied environments.
PrefPoE: Advantage-Guided Preference Fusion for Learning Where to Explore
Nov 11, 2025Exploration in reinforcement learning remains a critical challenge, as naive entropy maximization often results in high variance and inefficient policy updates. We introduce \textbf{PrefPoE}, a novel \textit{Preference-Product-of-Experts} framework that performs intelligent, advantage-guided exploration via the first principled application of product-of-experts (PoE) fusion for single-task exploration-exploitation balancing. By training a preference network to concentrate probability mass on high-advantage actions and fusing it with the main policy through PoE, PrefPoE creates a \textbf{soft trust region} that stabilizes policy updates while maintaining targeted exploration. Across diverse control tasks spanning both continuous and discrete action spaces, PrefPoE demonstrates consistent improvements: +321\% on HalfCheetah-v4 (1276~$\rightarrow$~5375), +69\% on Ant-v4, +276\% on LunarLander-v2, with consistently enhanced training stability and sample efficiency. Unlike standard PPO, which suffers from entropy collapse, PrefPoE sustains adaptive exploration through its unique dynamics, thereby preventing premature convergence and enabling superior performance. Our results establish that learning \textit{where to explore} through advantage-guided preferences is as crucial as learning how to act, offering a general framework for enhancing policy gradient methods across the full spectrum of reinforcement learning domains. Code and pretrained models are available in supplementary materials.
HOI-Dyn: Learning Interaction Dynamics for Human-Object Motion Diffusion
Jul 03, 2025Generating realistic 3D human-object interactions (HOIs) remains a challenging task due to the difficulty of modeling detailed interaction dynamics. Existing methods treat human and object motions independently, resulting in physically implausible and causally inconsistent behaviors. In this work, we present HOI-Dyn, a novel framework that formulates HOI generation as a driver-responder system, where human actions drive object responses. At the core of our method is a lightweight transformer-based interaction dynamics model that explicitly predicts how objects should react to human motion. To further enforce consistency, we introduce a residual-based dynamics loss that mitigates the impact of dynamics prediction errors and prevents misleading optimization signals. The dynamics model is used only during training, preserving inference efficiency. Through extensive qualitative and quantitative experiments, we demonstrate that our approach not only enhances the quality of HOI generation but also establishes a feasible metric for evaluating the quality of generated interactions.
Grower-in-the-Loop Interactive Reinforcement Learning for Greenhouse Climate Control
May 29, 2025Climate control is crucial for greenhouse production as it directly affects crop growth and resource use. Reinforcement learning (RL) has received increasing attention in this field, but still faces challenges, including limited training efficiency and high reliance on initial learning conditions. Interactive RL, which combines human (grower) input with the RL agent's learning, offers a potential solution to overcome these challenges. However, interactive RL has not yet been applied to greenhouse climate control and may face challenges related to imperfect inputs. Therefore, this paper aims to explore the possibility and performance of applying interactive RL with imperfect inputs into greenhouse climate control, by: (1) developing three representative interactive RL algorithms tailored for greenhouse climate control (reward shaping, policy shaping and control sharing); (2) analyzing how input characteristics are often contradicting, and how the trade-offs between them make grower's inputs difficult to perfect; (3) proposing a neural network-based approach to enhance the robustness of interactive RL agents under limited input availability; (4) conducting a comprehensive evaluation of the three interactive RL algorithms with imperfect inputs in a simulated greenhouse environment. The demonstration shows that interactive RL incorporating imperfect grower inputs has the potential to improve the performance of the RL agent. RL algorithms that influence action selection, such as policy shaping and control sharing, perform better when dealing with imperfect inputs, achieving 8.4% and 6.8% improvement in profit, respectively. In contrast, reward shaping, an algorithm that manipulates the reward function, is sensitive to imperfect inputs and leads to a 9.4% decrease in profit. This highlights the importance of selecting an appropriate mechanism when incorporating imperfect inputs.
Automatic Robot Task Planning by Integrating Large Language Model with Genetic Programming
Feb 11, 2025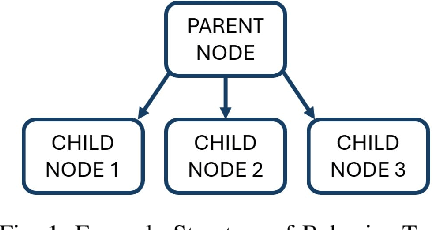
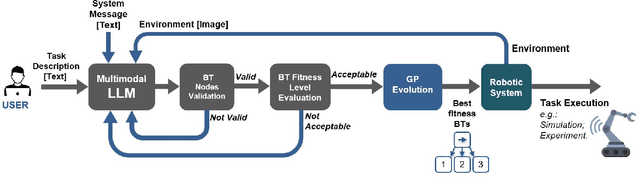
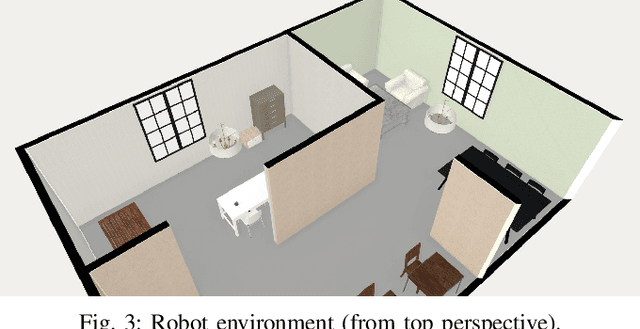
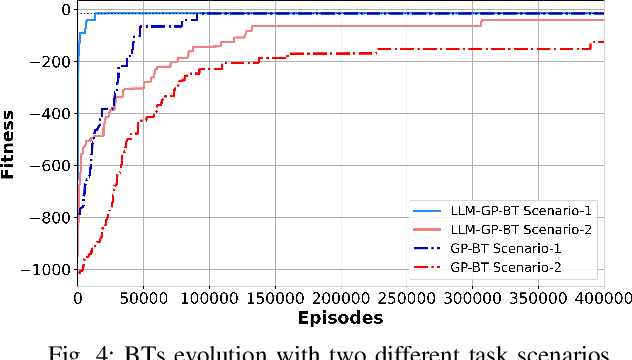
Accurate task planning is critical for controlling autonomous systems, such as robots, drones, and self-driving vehicles. Behavior Trees (BTs) are considered one of the most prominent control-policy-defining frameworks in task planning, due to their modularity, flexibility, and reusability. Generating reliable and accurate BT-based control policies for robotic systems remains challenging and often requires domain expertise. In this paper, we present the LLM-GP-BT technique that leverages the Large Language Model (LLM) and Genetic Programming (GP) to automate the generation and configuration of BTs. The LLM-GP-BT technique processes robot task commands expressed in human natural language and converts them into accurate and reliable BT-based task plans in a computationally efficient and user-friendly manner. The proposed technique is systematically developed and validated through simulation experiments, demonstrating its potential to streamline task planning for autonomous systems.
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Aug 21, 2024



The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
A Conflicts-free, Speed-lossless KAN-based Reinforcement Learning Decision System for Interactive Driving in Roundabouts
Aug 15, 2024



Safety and efficiency are crucial for autonomous driving in roundabouts, especially in the context of mixed traffic where autonomous vehicles (AVs) and human-driven vehicles coexist. This paper introduces a learning-based algorithm tailored to foster safe and efficient driving behaviors across varying levels of traffic flows in roundabouts. The proposed algorithm employs a deep Q-learning network to effectively learn safe and efficient driving strategies in complex multi-vehicle roundabouts. Additionally, a KAN (Kolmogorov-Arnold network) enhances the AVs' ability to learn their surroundings robustly and precisely. An action inspector is integrated to replace dangerous actions to avoid collisions when the AV interacts with the environment, and a route planner is proposed to enhance the driving efficiency and safety of the AVs. Moreover, a model predictive control is adopted to ensure stability and precision of the driving actions. The results show that our proposed system consistently achieves safe and efficient driving whilst maintaining a stable training process, as evidenced by the smooth convergence of the reward function and the low variance in the training curves across various traffic flows. Compared to state-of-the-art benchmarks, the proposed algorithm achieves a lower number of collisions and reduced travel time to destination.
Efficient model predictive control for nonlinear systems modelled by deep neural networks
May 16, 2024



This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
Real-Time Safe Control of Neural Network Dynamic Models with Sound Approximation
Apr 20, 2024



Safe control of neural network dynamic models (NNDMs) is important to robotics and many applications. However, it remains challenging to compute an optimal safe control in real time for NNDM. To enable real-time computation, we propose to use a sound approximation of the NNDM in the control synthesis. In particular, we propose Bernstein over-approximated neural dynamics (BOND) based on the Bernstein polynomial over-approximation (BPO) of ReLU activation functions in NNDM. To mitigate the errors introduced by the approximation and to ensure persistent feasibility of the safe control problems, we synthesize a worst-case safety index using the most unsafe approximated state within the BPO relaxation of NNDM offline. For the online real-time optimization, we formulate the first-order Taylor approximation of the nonlinear worst-case safety constraint as an additional linear layer of NNDM with the l2 bounded bias term for the higher-order remainder. Comprehensive experiments with different neural dynamics and safety constraints show that with safety guaranteed, our NNDMs with sound approximation are 10-100 times faster than the safe control baseline that uses mixed integer programming (MIP), validating the effectiveness of the worst-case safety index and scalability of the proposed BOND in real-time large-scale settings.
Runtime Monitoring and Fault Detection for Neural Network-Controlled Systems
Mar 24, 2024There is an emerging trend in applying deep learning methods to control complex nonlinear systems. This paper considers enhancing the runtime safety of nonlinear systems controlled by neural networks in the presence of disturbance and measurement noise. A robustly stable interval observer is designed to generate sound and precise lower and upper bounds for the neural network, nonlinear function, and system state. The obtained interval is utilised to monitor the real-time system safety and detect faults in the system outputs or actuators. An adaptive cruise control vehicular system is simulated to demonstrate effectiveness of the proposed design.