 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXS-VID: An Extremely Small Video Object Detection Dataset
Jul 25, 2024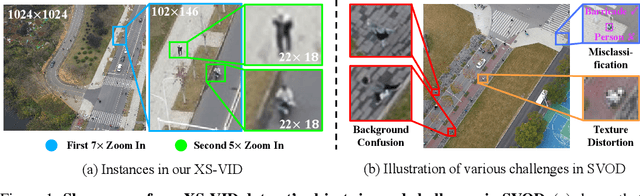

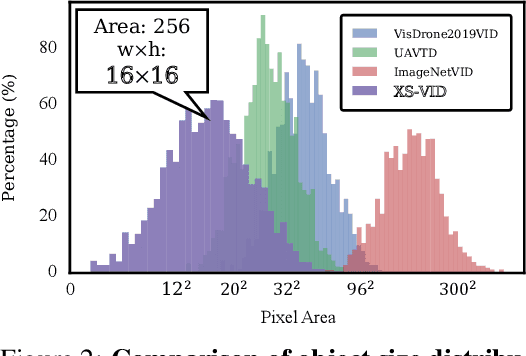
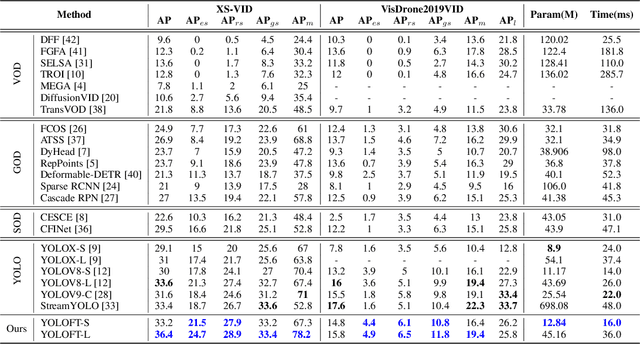
Small Video Object Detection (SVOD) is a crucial subfield in modern computer vision, essential for early object discovery and detection. However, existing SVOD datasets are scarce and suffer from issues such as insufficiently small objects, limited object categories, and lack of scene diversity, leading to unitary application scenarios for corresponding methods. To address this gap, we develop the XS-VID dataset, which comprises aerial data from various periods and scenes, and annotates eight major object categories. To further evaluate existing methods for detecting extremely small objects, XS-VID extensively collects three types of objects with smaller pixel areas: extremely small (\textit{es}, $0\sim12^2$), relatively small (\textit{rs}, $12^2\sim20^2$), and generally small (\textit{gs}, $20^2\sim32^2$). XS-VID offers unprecedented breadth and depth in covering and quantifying minuscule objects, significantly enriching the scene and object diversity in the dataset. Extensive validations on XS-VID and the publicly available VisDrone2019VID dataset show that existing methods struggle with small object detection and significantly underperform compared to general object detectors. Leveraging the strengths of previous methods and addressing their weaknesses, we propose YOLOFT, which enhances local feature associations and integrates temporal motion features, significantly improving the accuracy and stability of SVOD. Our datasets and benchmarks are available at \url{https://gjhhust.github.io/XS-VID/}.
Circuit as Set of Points
Oct 26, 2023



As the size of circuit designs continues to grow rapidly, artificial intelligence technologies are being extensively used in Electronic Design Automation (EDA) to assist with circuit design. Placement and routing are the most time-consuming parts of the physical design process, and how to quickly evaluate the placement has become a hot research topic. Prior works either transformed circuit designs into images using hand-crafted methods and then used Convolutional Neural Networks (CNN) to extract features, which are limited by the quality of the hand-crafted methods and could not achieve end-to-end training, or treated the circuit design as a graph structure and used Graph Neural Networks (GNN) to extract features, which require time-consuming preprocessing. In our work, we propose a novel perspective for circuit design by treating circuit components as point clouds and using Transformer-based point cloud perception methods to extract features from the circuit. This approach enables direct feature extraction from raw data without any preprocessing, allows for end-to-end training, and results in high performance. Experimental results show that our method achieves state-of-the-art performance in congestion prediction tasks on both the CircuitNet and ISPD2015 datasets, as well as in design rule check (DRC) violation prediction tasks on the CircuitNet dataset. Our method establishes a bridge between the relatively mature point cloud perception methods and the fast-developing EDA algorithms, enabling us to leverage more collective intelligence to solve this task. To facilitate the research of open EDA design, source codes and pre-trained models are released at https://github.com/hustvl/circuitformer.
Reduced network extremal ensemble learning (RenEEL) scheme for community detection in complex networks
Sep 23, 2019


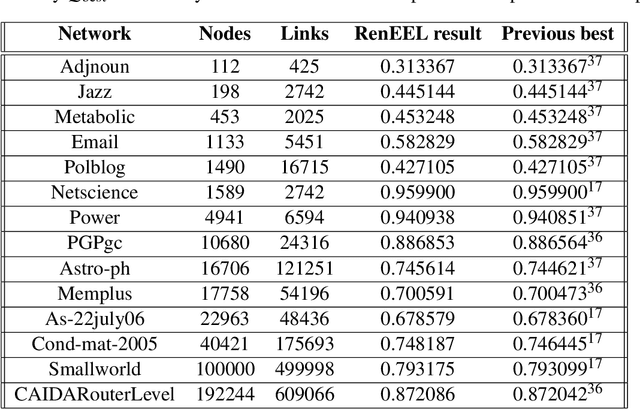
We introduce an ensemble learning scheme for community detection in complex networks. The scheme uses a Machine Learning algorithmic paradigm we call Extremal Ensemble Learning. It uses iterative extremal updating of an ensemble of network partitions, which can be found by a conventional base algorithm, to find a node partition that maximizes modularity. At each iteration, core groups of nodes that are in the same community in every ensemble partition are identified and used to form a reduced network. Partitions of the reduced network are then found and used to update the ensemble. The smaller size of the reduced network makes the scheme efficient. We use the scheme to analyze the community structure in a set of commonly studied benchmark networks and find that it outperforms all other known methods for finding the partition with maximum modularity.