 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGNisi: A graph network for reconstructing Ising models from multivariate binarized data
Sep 09, 2021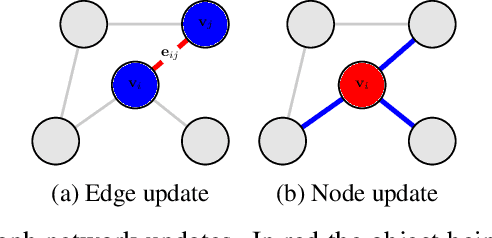
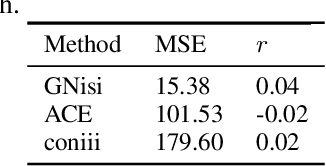
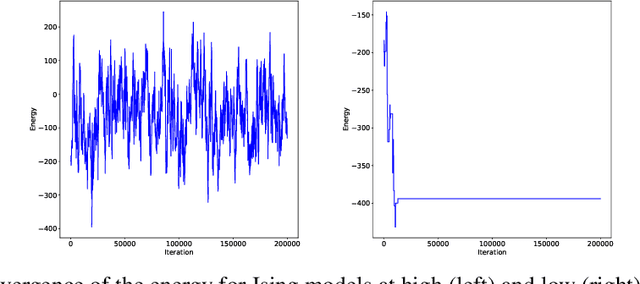
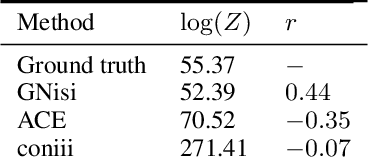
Ising models are a simple generative approach to describing interacting binary variables. They have proven useful in a number of biological settings because they enable one to represent observed many-body correlations as the separable consequence of many direct, pairwise statistical interactions. The inference of Ising models from data can be computationally very challenging and often one must be satisfied with numerical approximations or limited precision. In this paper we present a novel method for the determination of Ising parameters from data, called GNisi, which uses a Graph Neural network trained on known Ising models in order to construct the parameters for unseen data. We show that GNisi is more accurate than the existing state of the art software, and we illustrate our method by applying GNisi to gene expression data.
Low rattling: A predictive principle for self-organization in active collectives
Jan 03, 2021Self-organization is frequently observed in active collectives, from ant rafts to molecular motor assemblies. General principles describing self-organization away from equilibrium have been challenging to identify. We offer a unifying framework that models the behavior of complex systems as largely random, while capturing their configuration-dependent response to external forcing. This allows derivation of a Boltzmann-like principle for understanding and manipulating driven self-organization. We validate our predictions experimentally in shape-changing robotic active matter, and outline a methodology for controlling collective behavior. Our findings highlight how emergent order depends sensitively on the matching between external patterns of forcing and internal dynamical response properties, pointing towards future approaches for design and control of active particle mixtures and metamaterials.