 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoViS-Net: A Cooperative Visual Spatial Foundation Model for Multi-Robot Applications
May 02, 2024Spatial understanding from vision is crucial for robots operating in unstructured environments. In the real world, spatial understanding is often an ill-posed problem. There are a number of powerful classical methods that accurately regress relative pose, however, these approaches often lack the ability to leverage data-derived priors to resolve ambiguities. In multi-robot systems, these challenges are exacerbated by the need for accurate and frequent position estimates of cooperating agents. To this end, we propose CoViS-Net, a cooperative, multi-robot, visual spatial foundation model that learns spatial priors from data. Unlike prior work evaluated primarily on offline datasets, we design our model specifically for online evaluation and real-world deployment on cooperative robots. Our model is completely decentralized, platform agnostic, executable in real-time using onboard compute, and does not require existing network infrastructure. In this work, we focus on relative pose estimation and local Bird's Eye View (BEV) prediction tasks. Unlike classical approaches, we show that our model can accurately predict relative poses without requiring camera overlap, and predict BEVs of regions not visible to the ego-agent. We demonstrate our model on a multi-robot formation control task outside the confines of the laboratory.
Modeling Aggregate Downwash Forces for Dense Multirotor Flight
Dec 06, 2023Dense formation flight with multirotor swarms is a powerful, nature-inspired flight regime with numerous applications in the realworld. However, when multirotors fly in close vertical proximity to each other, the propeller downwash from the vehicles can have a destabilising effect on each other. Unfortunately, even in a homogeneous team, an accurate model of downwash forces from one vehicle is unlikely to be sufficient for predicting aggregate forces from multiple vehicles in formation. In this work, we model the interaction patterns produced by one or more vehicles flying in close proximity to an ego-vehicle. We first present an experimental test rig designed to capture 6-DOF exogenic forces acting on a multirotor frame. We then study and characterize these measured forces as a function of the relative states of two multirotors flying various patterns in its vicinity. Our analysis captures strong non-linearities present in the aggregation of these interactions. Then, by modeling the formation as a graph, we present a novel approach for learning the force aggregation function, and contrast it against simpler linear models. Finally, we explore how our proposed models generalize when a fourth vehicle is added to the formation.
A Critical Review of Communications in Multi-Robot Systems
Jun 19, 2022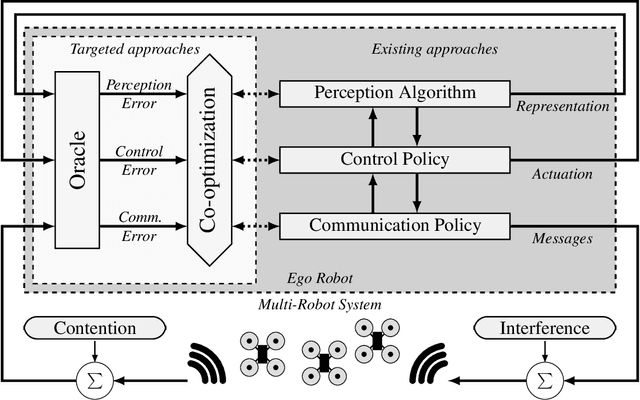
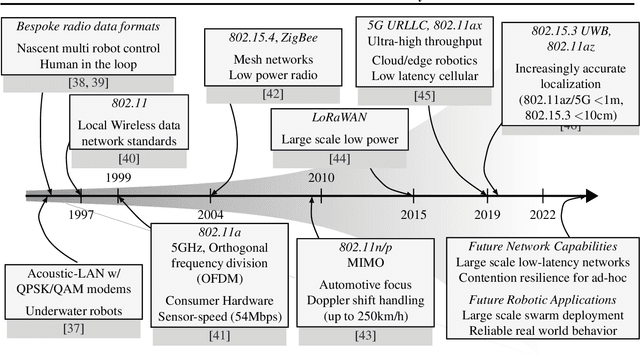
Purpose of Review. This review summarizes the broad roles that communication formats and technologies have played in enabling multi-robot systems. We approach this field from two perspectives: of robotic applications that need communication capabilities in order to accomplish tasks, and of networking technologies that have enabled newer and more advanced multi-robot systems. Recent Findings. Through this review, we identify a dearth of work that holistically tackles the problem of co-design and co-optimization of robots and the networks they employ. We also highlight the role that data-driven and machine learning approaches play in evolving communication pipelines for multi-robot systems. In particular, we refer to recent work that diverges from hand-designed communication patterns, and also discuss the "sim-to-real" gap in this context. Summary. We present a critical view of the way robotic algorithms and their networking systems have evolved, and make the case for a more synergistic approach. Finally, we also identify four broad Open Problems for research and development, while offering a data-driven perspective for solving some of them.
A Framework for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies
Nov 02, 2021



Graph Neural Networks (GNNs) are a paradigm-shifting neural architecture to facilitate the learning of complex multi-agent behaviors. Recent work has demonstrated remarkable performance in tasks such as flocking, multi-agent path planning and cooperative coverage. However, the policies derived through GNN-based learning schemes have not yet been deployed to the real-world on physical multi-robot systems. In this work, we present the design of a system that allows for fully decentralized execution of GNN-based policies. We create a framework based on ROS2 and elaborate its details in this paper. We demonstrate our framework on a case-study that requires tight coordination between robots, and present first-of-a-kind results that show successful real-world deployment of GNN-based policies on a decentralized multi-robot system relying on Adhoc communication. A video demonstration of this case-study can be found online. https://www.youtube.com/watch?v=COh-WLn4iO4