 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Critical Review of Communications in Multi-Robot Systems
Paper and Code
Jun 19, 2022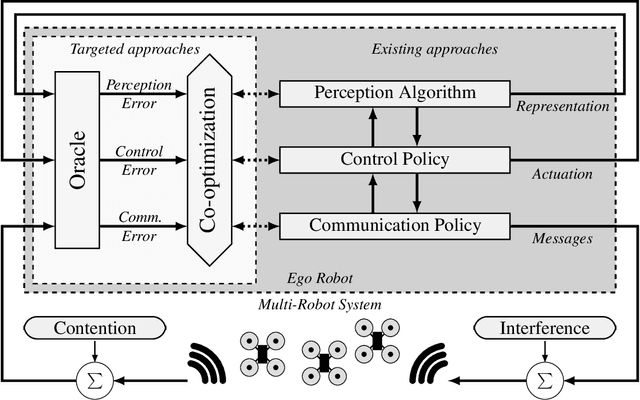
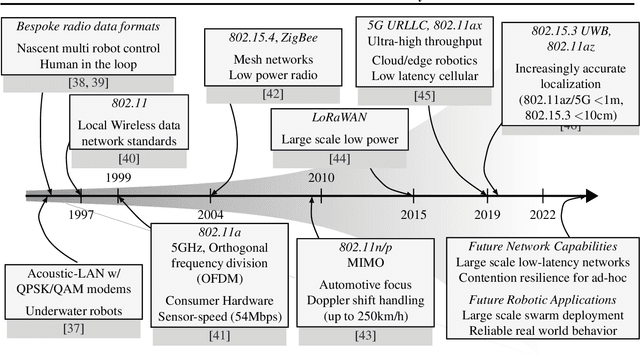
Purpose of Review. This review summarizes the broad roles that communication formats and technologies have played in enabling multi-robot systems. We approach this field from two perspectives: of robotic applications that need communication capabilities in order to accomplish tasks, and of networking technologies that have enabled newer and more advanced multi-robot systems. Recent Findings. Through this review, we identify a dearth of work that holistically tackles the problem of co-design and co-optimization of robots and the networks they employ. We also highlight the role that data-driven and machine learning approaches play in evolving communication pipelines for multi-robot systems. In particular, we refer to recent work that diverges from hand-designed communication patterns, and also discuss the "sim-to-real" gap in this context. Summary. We present a critical view of the way robotic algorithms and their networking systems have evolved, and make the case for a more synergistic approach. Finally, we also identify four broad Open Problems for research and development, while offering a data-driven perspective for solving some of them.