 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREASSEMBLE: A Multimodal Dataset for Contact-rich Robotic Assembly and Disassembly
Feb 07, 2025Robotic manipulation remains a core challenge in robotics, particularly for contact-rich tasks such as industrial assembly and disassembly. Existing datasets have significantly advanced learning in manipulation but are primarily focused on simpler tasks like object rearrangement, falling short of capturing the complexity and physical dynamics involved in assembly and disassembly. To bridge this gap, we present REASSEMBLE (Robotic assEmbly disASSEMBLy datasEt), a new dataset designed specifically for contact-rich manipulation tasks. Built around the NIST Assembly Task Board 1 benchmark, REASSEMBLE includes four actions (pick, insert, remove, and place) involving 17 objects. The dataset contains 4,551 demonstrations, of which 4,035 were successful, spanning a total of 781 minutes. Our dataset features multi-modal sensor data including event cameras, force-torque sensors, microphones, and multi-view RGB cameras. This diverse dataset supports research in areas such as learning contact-rich manipulation, task condition identification, action segmentation, and more. We believe REASSEMBLE will be a valuable resource for advancing robotic manipulation in complex, real-world scenarios. The dataset is publicly available on our project website: https://dsliwowski1.github.io/REASSEMBLE_page.
Don't Start From Scratch: Leveraging Prior Data to Automate Robotic Reinforcement Learning
Jul 17, 2022
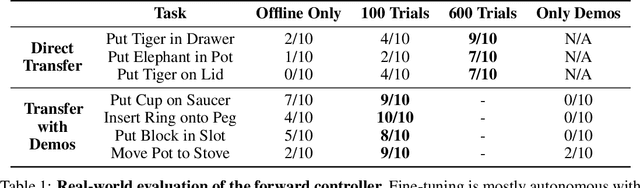
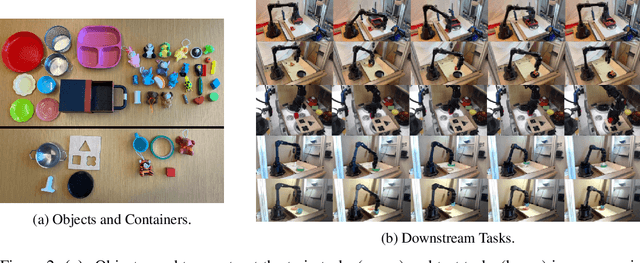
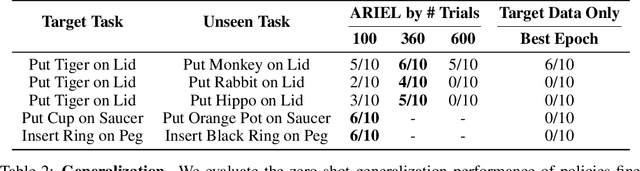
Reinforcement learning (RL) algorithms hold the promise of enabling autonomous skill acquisition for robotic systems. However, in practice, real-world robotic RL typically requires time consuming data collection and frequent human intervention to reset the environment. Moreover, robotic policies learned with RL often fail when deployed beyond the carefully controlled setting in which they were learned. In this work, we study how these challenges can all be tackled by effective utilization of diverse offline datasets collected from previously seen tasks. When faced with a new task, our system adapts previously learned skills to quickly learn to both perform the new task and return the environment to an initial state, effectively performing its own environment reset. Our empirical results demonstrate that incorporating prior data into robotic reinforcement learning enables autonomous learning, substantially improves sample-efficiency of learning, and enables better generalization. Project website: https://sites.google.com/view/ariel-berkeley/