 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDDAT: Diffusion Policies Enforcing Dynamically Admissible Robot Trajectories
Feb 20, 2025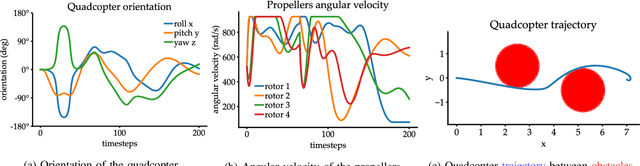
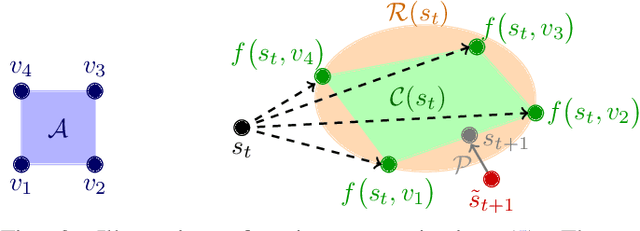
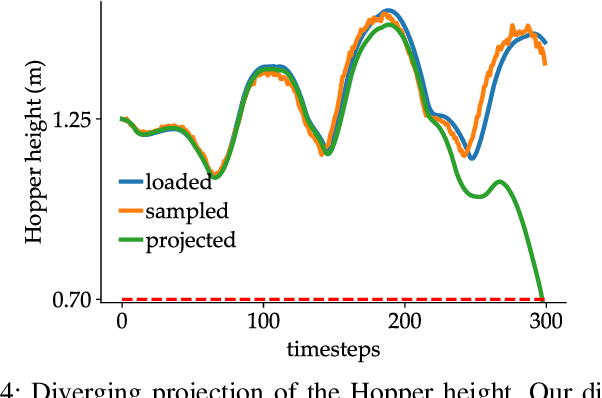
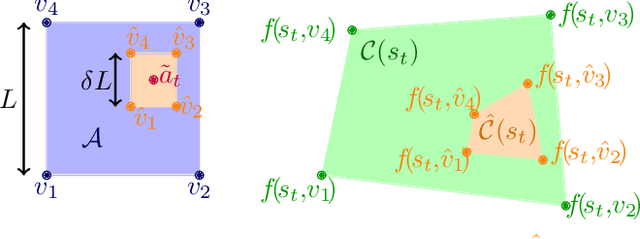
Diffusion models excel at creating images and videos thanks to their multimodal generative capabilities. These same capabilities have made diffusion models increasingly popular in robotics research, where they are used for generating robot motion. However, the stochastic nature of diffusion models is fundamentally at odds with the precise dynamical equations describing the feasible motion of robots. Hence, generating dynamically admissible robot trajectories is a challenge for diffusion models. To alleviate this issue, we introduce DDAT: Diffusion policies for Dynamically Admissible Trajectories to generate provably admissible trajectories of black-box robotic systems using diffusion models. A sequence of states is a dynamically admissible trajectory if each state of the sequence belongs to the reachable set of its predecessor by the robot's equations of motion. To generate such trajectories, our diffusion policies project their predictions onto a dynamically admissible manifold during both training and inference to align the objective of the denoiser neural network with the dynamical admissibility constraint. The auto-regressive nature of these projections along with the black-box nature of robot dynamics render these projections immensely challenging. We thus enforce admissibility by iteratively sampling a polytopic under-approximation of the reachable set of a state onto which we project its predicted successor, before iterating this process with the projected successor. By producing accurate trajectories, this projection eliminates the need for diffusion models to continually replan, enabling one-shot long-horizon trajectory planning. We demonstrate that our framework generates higher quality dynamically admissible robot trajectories through extensive simulations on a quadcopter and various MuJoCo environments, along with real-world experiments on a Unitree GO1 and GO2.
Risk-Sensitive Orbital Debris Collision Avoidance using Distributionally Robust Chance Constraints
Dec 23, 2024



The exponential increase in orbital debris and active satellites will lead to congested orbits, necessitating more frequent collision avoidance maneuvers by satellites. To minimize fuel consumption while ensuring the safety of satellites, enforcing a chance constraint, which poses an upper bound in collision probability with debris, can serve as an intuitive safety measure. However, accurately evaluating collision probability, which is critical for the effective implementation of chance constraints, remains a non-trivial task. This difficulty arises because uncertainty propagation in nonlinear orbit dynamics typically provides only limited information, such as finite samples or moment estimates about the underlying arbitrary non-Gaussian distributions. Furthermore, even if the full distribution were known, it remains unclear how to effectively compute chance constraints with such non-Gaussian distributions. To address these challenges, we propose a distributionally robust chance-constrained collision avoidance algorithm that provides a sufficient condition for collision probabilities under limited information about the underlying non-Gaussian distribution. Our distributionally robust approach satisfies the chance constraint for all debris position distributions sharing a given mean and covariance, thereby enabling the enforcement of chance constraints with limited distributional information. To achieve computational tractability, the chance constraint is approximated using a Conditional Value-at-Risk (CVaR) constraint, which gives a conservative and tractable approximation of the distributionally robust chance constraint. We validate our algorithm on a real-world inspired satellite-debris conjunction scenario with different uncertainty propagation methods and show that our controller can effectively avoid collisions.
POLICEd RL: Learning Closed-Loop Robot Control Policies with Provable Satisfaction of Hard Constraints
Mar 20, 2024



In this paper, we seek to learn a robot policy guaranteed to satisfy state constraints. To encourage constraint satisfaction, existing RL algorithms typically rely on Constrained Markov Decision Processes and discourage constraint violations through reward shaping. However, such soft constraints cannot offer verifiable safety guarantees. To address this gap, we propose POLICEd RL, a novel RL algorithm explicitly designed to enforce affine hard constraints in closed-loop with a black-box environment. Our key insight is to force the learned policy to be affine around the unsafe set and use this affine region as a repulsive buffer to prevent trajectories from violating the constraint. We prove that such policies exist and guarantee constraint satisfaction. Our proposed framework is applicable to both systems with continuous and discrete state and action spaces and is agnostic to the choice of the RL training algorithm. Our results demonstrate the capacity of POLICEd RL to enforce hard constraints in robotic tasks while significantly outperforming existing methods.