 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDDAT: Diffusion Policies Enforcing Dynamically Admissible Robot Trajectories
Paper and Code
Feb 20, 2025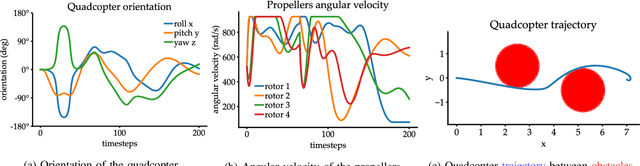
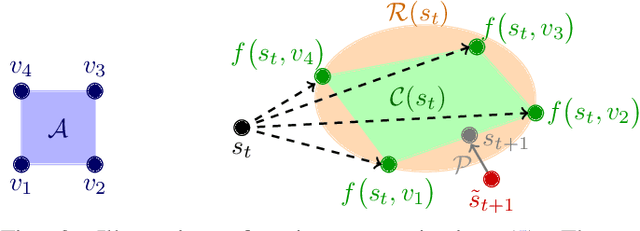
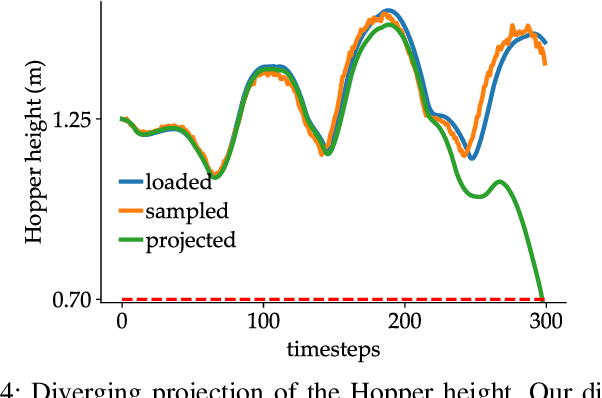
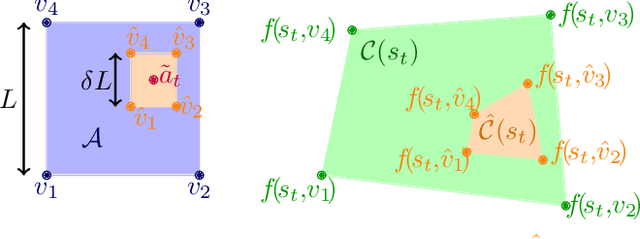
Diffusion models excel at creating images and videos thanks to their multimodal generative capabilities. These same capabilities have made diffusion models increasingly popular in robotics research, where they are used for generating robot motion. However, the stochastic nature of diffusion models is fundamentally at odds with the precise dynamical equations describing the feasible motion of robots. Hence, generating dynamically admissible robot trajectories is a challenge for diffusion models. To alleviate this issue, we introduce DDAT: Diffusion policies for Dynamically Admissible Trajectories to generate provably admissible trajectories of black-box robotic systems using diffusion models. A sequence of states is a dynamically admissible trajectory if each state of the sequence belongs to the reachable set of its predecessor by the robot's equations of motion. To generate such trajectories, our diffusion policies project their predictions onto a dynamically admissible manifold during both training and inference to align the objective of the denoiser neural network with the dynamical admissibility constraint. The auto-regressive nature of these projections along with the black-box nature of robot dynamics render these projections immensely challenging. We thus enforce admissibility by iteratively sampling a polytopic under-approximation of the reachable set of a state onto which we project its predicted successor, before iterating this process with the projected successor. By producing accurate trajectories, this projection eliminates the need for diffusion models to continually replan, enabling one-shot long-horizon trajectory planning. We demonstrate that our framework generates higher quality dynamically admissible robot trajectories through extensive simulations on a quadcopter and various MuJoCo environments, along with real-world experiments on a Unitree GO1 and GO2.