 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Visual Trackers for Biomechanical Analysis of Running
May 07, 2025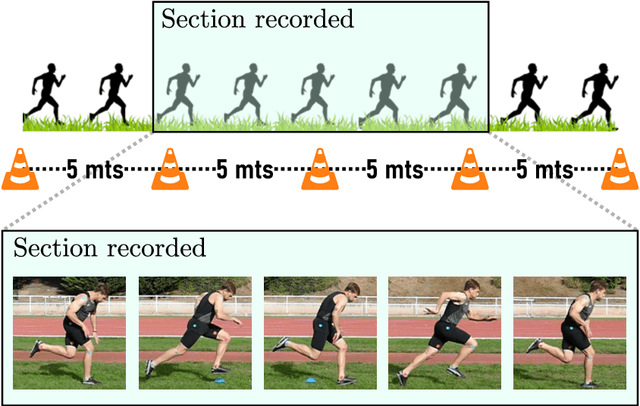
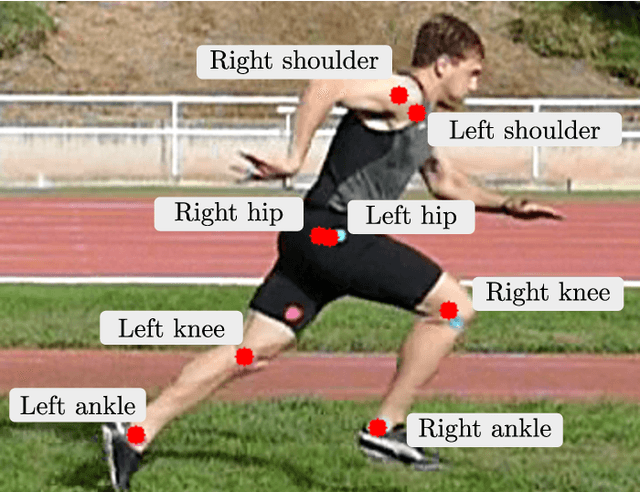
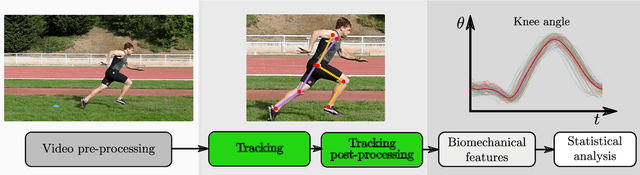
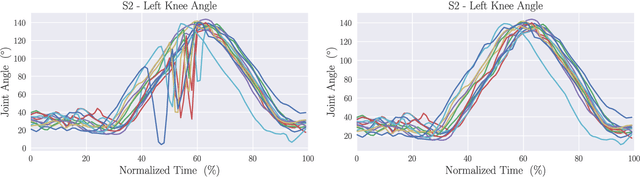
Human pose estimation has witnessed significant advancements in recent years, mainly due to the integration of deep learning models, the availability of a vast amount of data, and large computational resources. These developments have led to highly accurate body tracking systems, which have direct applications in sports analysis and performance evaluation. This work analyzes the performance of six trackers: two point trackers and four joint trackers for biomechanical analysis in sprints. The proposed framework compares the results obtained from these pose trackers with the manual annotations of biomechanical experts for more than 5870 frames. The experimental framework employs forty sprints from five professional runners, focusing on three key angles in sprint biomechanics: trunk inclination, hip flex extension, and knee flex extension. We propose a post-processing module for outlier detection and fusion prediction in the joint angles. The experimental results demonstrate that using joint-based models yields root mean squared errors ranging from 11.41{\deg} to 4.37{\deg}. When integrated with the post-processing modules, these errors can be reduced to 6.99{\deg} and 3.88{\deg}, respectively. The experimental findings suggest that human pose tracking approaches can be valuable resources for the biomechanical analysis of running. However, there is still room for improvement in applications where high accuracy is required.
VideoRun2D: Cost-Effective Markerless Motion Capture for Sprint Biomechanics
Sep 16, 2024Sprinting is a determinant ability, especially in team sports. The kinematics of the sprint have been studied in the past using different methods specially developed considering human biomechanics and, among those methods, markerless systems stand out as very cost-effective. On the other hand, we have now multiple general methods for pixel and body tracking based on recent machine learning breakthroughs with excellent performance in body tracking, but these excellent trackers do not generally consider realistic human biomechanics. This investigation first adapts two of these general trackers (MoveNet and CoTracker) for realistic biomechanical analysis and then evaluate them in comparison to manual tracking (with key points manually marked using the software Kinovea). Our best resulting markerless body tracker particularly adapted for sprint biomechanics is termed VideoRun2D. The experimental development and assessment of VideoRun2D is reported on forty sprints recorded with a video camera from 5 different subjects, focusing our analysis in 3 key angles in sprint biomechanics: inclination of the trunk, flex extension of the hip and the knee. The CoTracker method showed huge differences compared to the manual labeling approach. However, the angle curves were correctly estimated by the MoveNet method, finding errors between 3.2{\deg} and 5.5{\deg}. In conclusion, our proposed VideoRun2D based on MoveNet core seems to be a helpful tool for evaluating sprint kinematics in some scenarios. On the other hand, the observed precision of this first version of VideoRun2D as a markerless sprint analysis system may not be yet enough for highly demanding applications. Future research lines towards that purpose are also discussed at the end: better tracking post-processing and user- and time-dependent adaptation.
Supervised learning for improving the accuracy of robot-mounted 3D camera applied to human gait analysis
Jul 03, 2022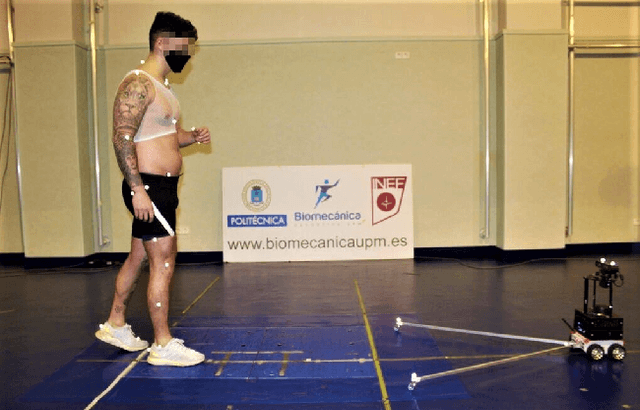
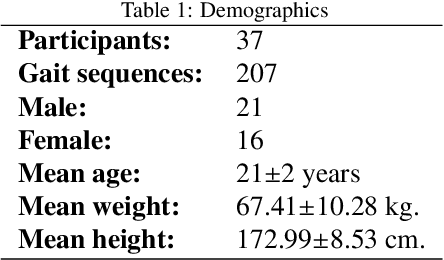

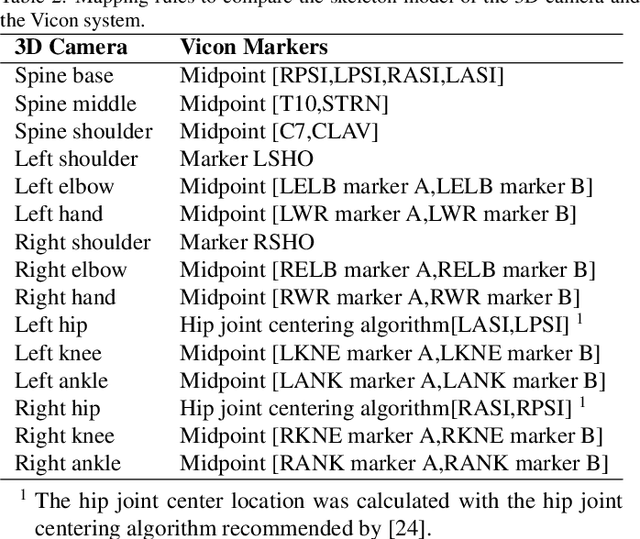
The use of 3D cameras for gait analysis has been highly questioned due to the low accuracy they have demonstrated in the past. The objective of the study presented in this paper is to improve the accuracy of the estimations made by robot-mounted 3D cameras in human gait analysis by applying a supervised learning stage. The 3D camera was mounted in a mobile robot to obtain a longer walking distance. This study shows an improvement in detection of kinematic gait signals and gait descriptors by post-processing the raw estimations of the camera using artificial neural networks trained with the data obtained from a certified Vicon system. To achieve this, 37 healthy participants were recruited and data of 207 gait sequences were collected using an Orbbec Astra 3D camera. There are two basic possible approaches for training: using kinematic gait signals and using gait descriptors. The former seeks to improve the waveforms of kinematic gait signals by reducing the error and increasing the correlation with respect to the Vicon system. The second is a more direct approach, focusing on training the artificial neural networks using gait descriptors directly. The accuracy of the 3D camera was measured before and after training. In both training approaches, an improvement was observed. Kinematic gait signals showed lower errors and higher correlations with respect to the ground truth. The accuracy of the system to detect gait descriptors also showed a substantial improvement, mostly for kinematic descriptors rather than spatio-temporal. When comparing both training approaches, it was not possible to define which was the absolute best. Therefore, we believe that the selection of the training approach will depend on the purpose of the study to be conducted. This study reveals the great potential of 3D cameras and encourages the research community to continue exploring their use in gait analysis.