 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFPGA-Accelerated SpeckleNN with SNL for Real-time X-ray Single-Particle Imaging
Feb 27, 2025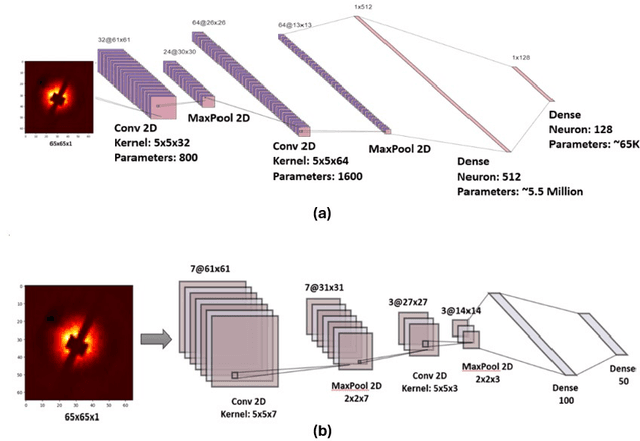
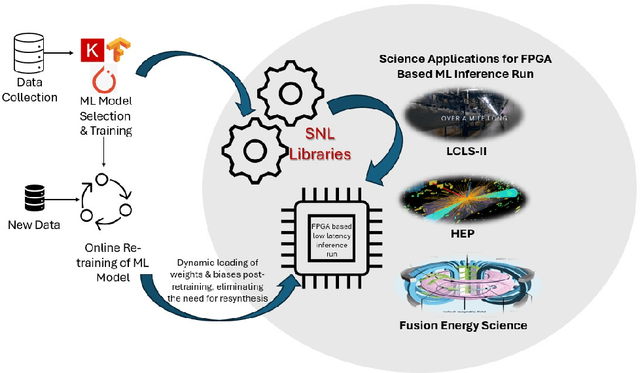
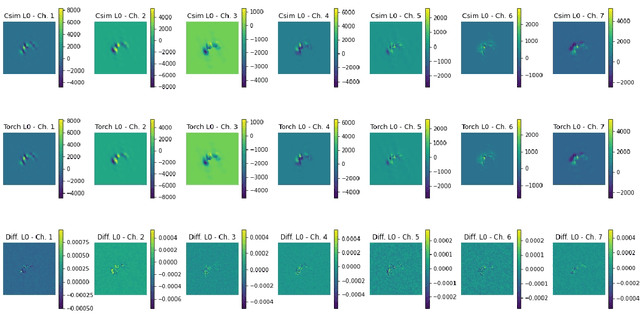

We implement a specialized version of our SpeckleNN model for real-time speckle pattern classification in X-ray Single-Particle Imaging (SPI) using the SLAC Neural Network Library (SNL) on an FPGA. This hardware is optimized for inference near detectors in high-throughput X-ray free-electron laser (XFEL) facilities like the Linac Coherent Light Source (LCLS). To fit FPGA constraints, we optimized SpeckleNN, reducing parameters from 5.6M to 64.6K (98.8% reduction) with 90% accuracy. We also compressed the latent space from 128 to 50 dimensions. Deployed on a KCU1500 FPGA, the model used 71% of DSPs, 75% of LUTs, and 48% of FFs, with an average power consumption of 9.4W. The FPGA achieved 45.015us inference latency at 200 MHz. On an NVIDIA A100 GPU, the same inference consumed ~73W and had a 400us latency. Our FPGA version achieved an 8.9x speedup and 7.8x power reduction over the GPU. Key advancements include model specialization and dynamic weight loading through SNL, eliminating time-consuming FPGA re-synthesis for fast, continuous deployment of (re)trained models. These innovations enable real-time adaptive classification and efficient speckle pattern vetoing, making SpeckleNN ideal for XFEL facilities. This implementation accelerates SPI experiments and enhances adaptability to evolving conditions.
Cooperative Localisation of a GPS-Denied UAV in 3-Dimensional Space Using Direction of Arrival Measurements
Mar 18, 2017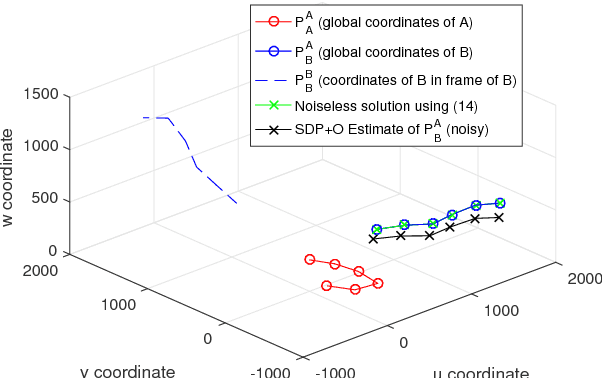
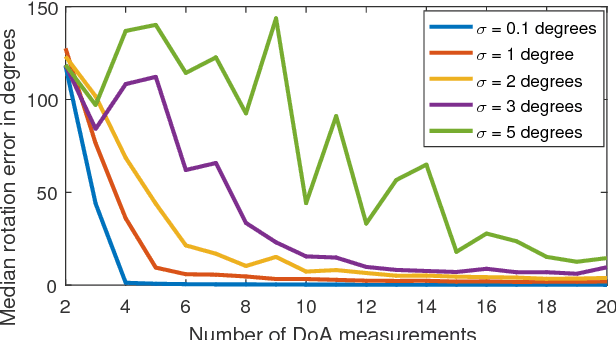
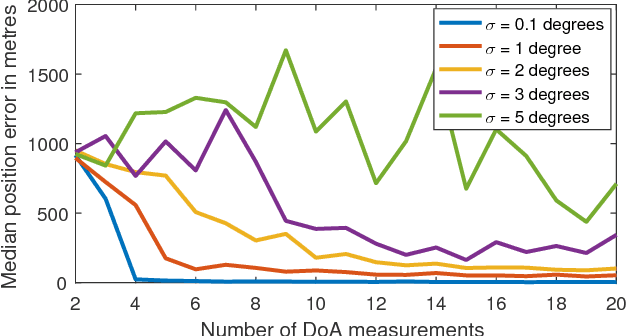
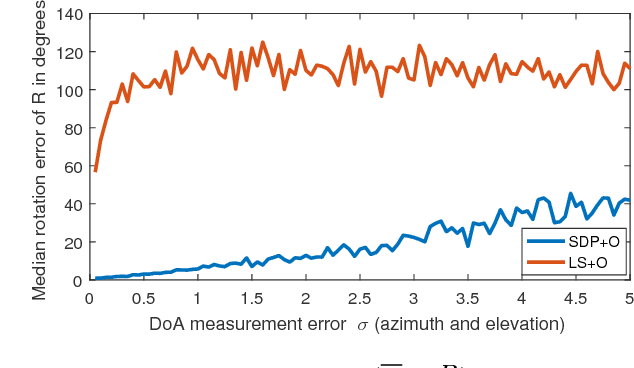
This paper presents a novel approach for localising a GPS (Global Positioning System)-denied Unmanned Aerial Vehicle (UAV) with the aid of a GPS-equipped UAV in three-dimensional space. The GPS-equipped UAV makes discrete-time broadcasts of its global coordinates. The GPS-denied UAV simultaneously receives the broadcast and takes direction of arrival (DOA) measurements towards the origin of the broadcast in its local coordinate frame (obtained via an inertial navigation system (INS)). The aim is to determine the difference between the local and global frames, described by a rotation and a translation. In the noiseless case, global coordinates were recovered exactly by solving a system of linear equations. When DOA measurements are contaminated with noise, rank relaxed semidefinite programming (SDP) and the Orthogonal Procrustes algorithm are employed. Simulations are provided and factors affecting accuracy, such as noise levels and number of measurements, are explored.