 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemystifying the COVID-19 vaccine discourse on Twitter
Aug 29, 2022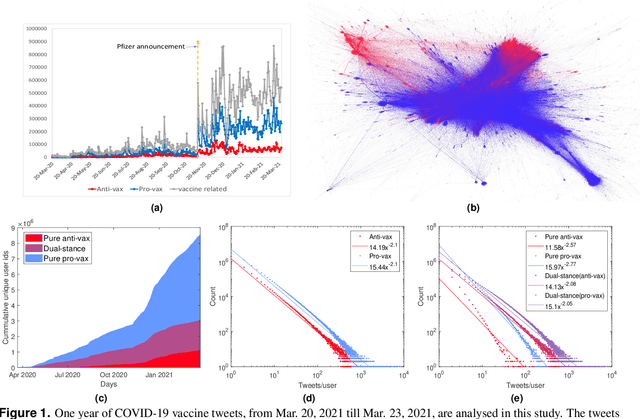
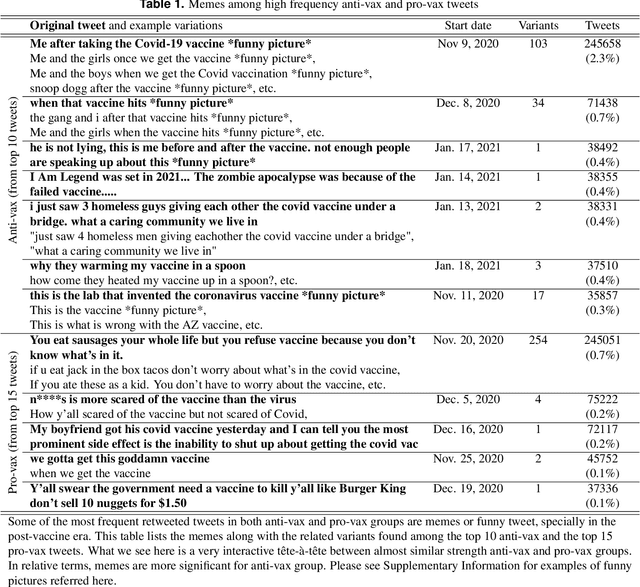
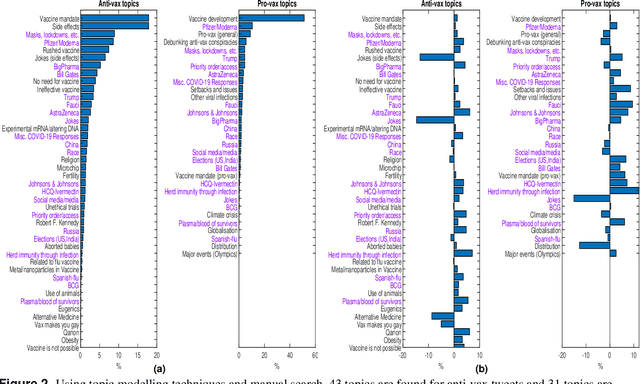
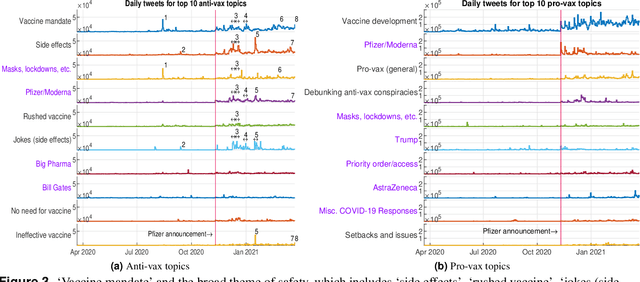
Developing an understanding of the public discourse on COVID-19 vaccination on social media is important not only for addressing the current COVID-19 pandemic, but also for future pathogen outbreaks. We examine a Twitter dataset containing 75 million English tweets discussing COVID-19 vaccination from March 2020 to March 2021. We train a stance detection algorithm using natural language processing (NLP) techniques to classify tweets as `anti-vax' or `pro-vax', and examine the main topics of discourse using topic modelling techniques. While pro-vax tweets (37 million) far outnumbered anti-vax tweets (10 million), a majority of tweets from both stances (63% anti-vax and 53% pro-vax tweets) came from dual-stance users who posted both pro- and anti-vax tweets during the observation period. Pro-vax tweets focused mostly on vaccine development, while anti-vax tweets covered a wide range of topics, some of which included genuine concerns, though there was a large dose of falsehoods. A number of topics were common to both stances, though pro- and anti-vax tweets discussed them from opposite viewpoints. Memes and jokes were amongst the most retweeted messages. Whereas concerns about polarisation and online prevalence of anti-vax discourse are unfounded, targeted countering of falsehoods is important.
Cooperative Localisation of a GPS-Denied UAV using Direction of Arrival Measurements
Nov 20, 2018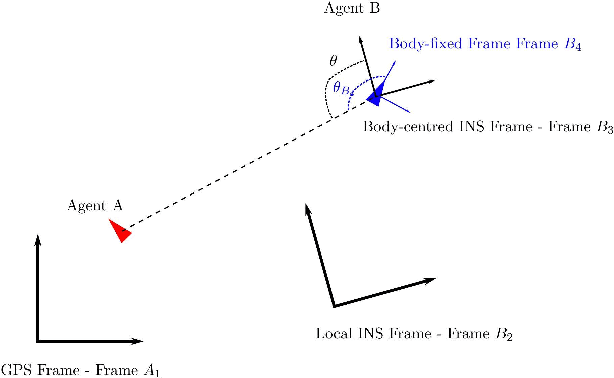
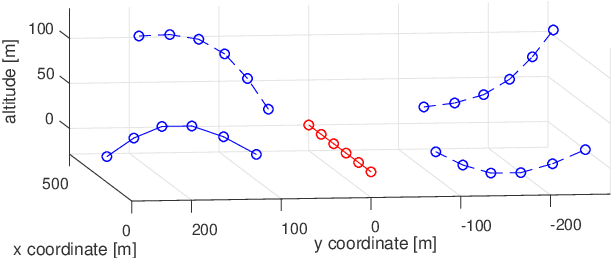
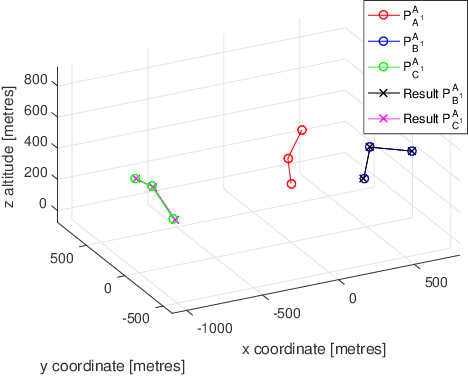
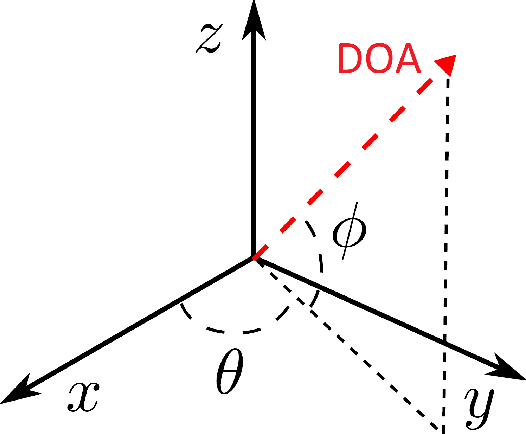
A GPS-denied UAV (Agent B) is localised through INS alignment with the aid of a nearby GPS-equipped UAV (Agent A), which broadcasts its position at several time instants. Agent B measures the signals' direction of arrival with respect to Agent B's inertial navigation frame. Semidefinite programming and the Orthogonal Procrustes algorithm are employed, and accuracy is improved through maximum likelihood estimation. The method is validated using flight data and simulations. A three-agent extension is explored.
Cooperative Localisation of a GPS-Denied UAV in 3-Dimensional Space Using Direction of Arrival Measurements
Mar 18, 2017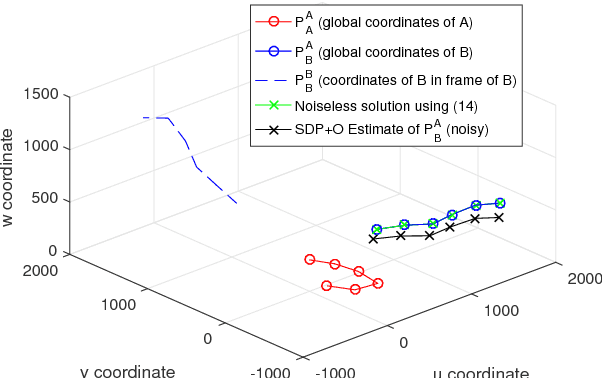
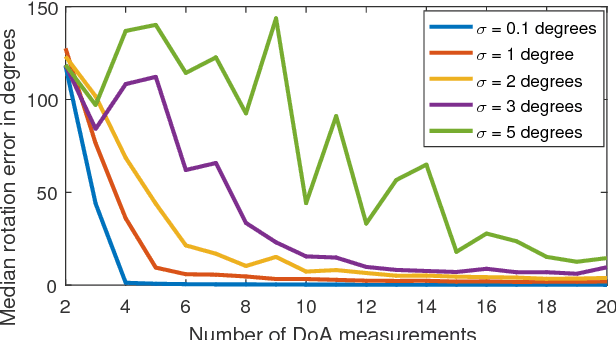
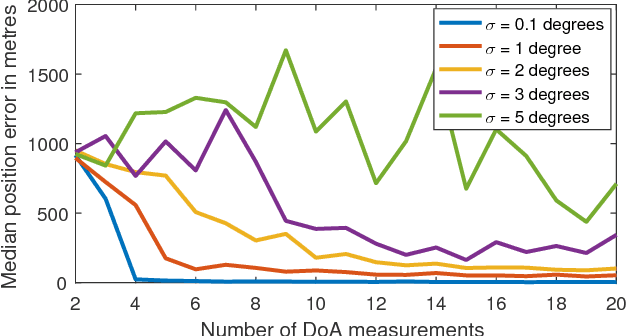
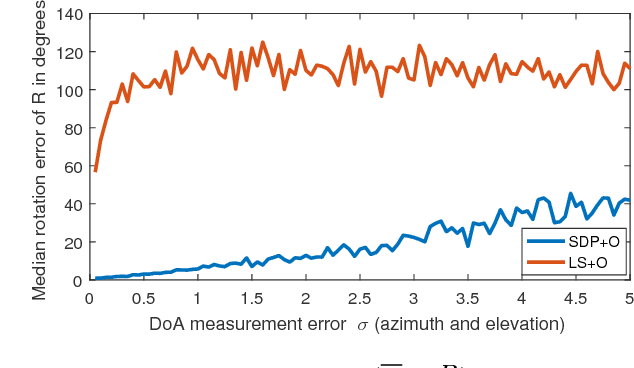
This paper presents a novel approach for localising a GPS (Global Positioning System)-denied Unmanned Aerial Vehicle (UAV) with the aid of a GPS-equipped UAV in three-dimensional space. The GPS-equipped UAV makes discrete-time broadcasts of its global coordinates. The GPS-denied UAV simultaneously receives the broadcast and takes direction of arrival (DOA) measurements towards the origin of the broadcast in its local coordinate frame (obtained via an inertial navigation system (INS)). The aim is to determine the difference between the local and global frames, described by a rotation and a translation. In the noiseless case, global coordinates were recovered exactly by solving a system of linear equations. When DOA measurements are contaminated with noise, rank relaxed semidefinite programming (SDP) and the Orthogonal Procrustes algorithm are employed. Simulations are provided and factors affecting accuracy, such as noise levels and number of measurements, are explored.