Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Localisation of a GPS-Denied UAV using Direction of Arrival Measurements
Nov 20, 2018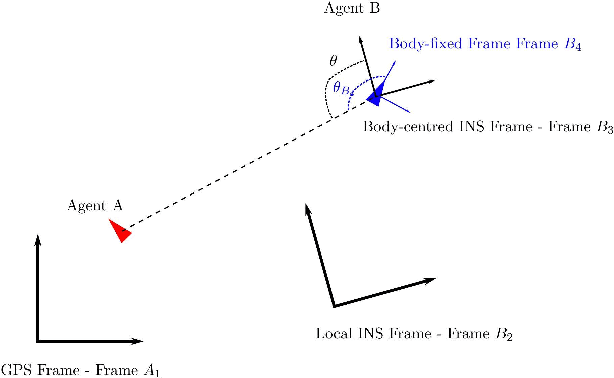
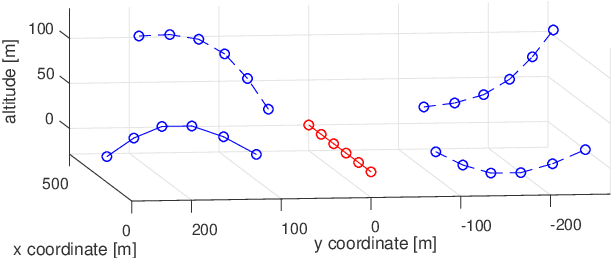
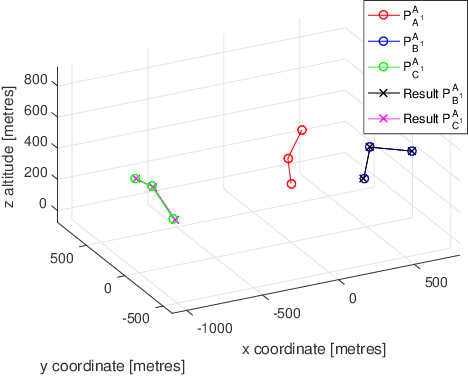
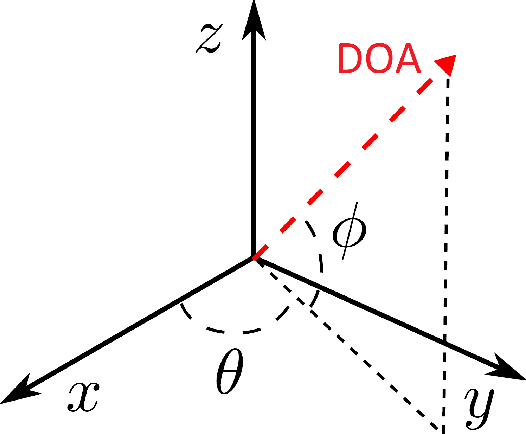
A GPS-denied UAV (Agent B) is localised through INS alignment with the aid of a nearby GPS-equipped UAV (Agent A), which broadcasts its position at several time instants. Agent B measures the signals' direction of arrival with respect to Agent B's inertial navigation frame. Semidefinite programming and the Orthogonal Procrustes algorithm are employed, and accuracy is improved through maximum likelihood estimation. The method is validated using flight data and simulations. A three-agent extension is explored.
* 13 pages, 11 figures, this is an extended version to an imminent
submission to IEEE Transactions on Aerospace and Electronic Systems. arXiv
admin note: text overlap with arXiv:1703.06261
Via