 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Intelligence in Materials Science and Engineering: Current Landscape, Key Challenges, and Future Trajectorie
Jan 18, 2026Artificial Intelligence is rapidly transforming materials science and engineering, offering powerful tools to navigate complexity, accelerate discovery, and optimize material design in ways previously unattainable. Driven by the accelerating pace of algorithmic advancements and increasing data availability, AI is becoming an essential competency for materials researchers. This review provides a comprehensive and structured overview of the current landscape, synthesizing recent advancements and methodologies for materials scientists seeking to effectively leverage these data-driven techniques. We survey the spectrum of machine learning approaches, from traditional algorithms to advanced deep learning architectures, including CNNs, GNNs, and Transformers, alongside emerging generative AI and probabilistic models such as Gaussian Processes for uncertainty quantification. The review also examines the pivotal role of data in this field, emphasizing how effective representation and featurization strategies, spanning compositional, structural, image-based, and language-inspired approaches, combined with appropriate preprocessing, fundamentally underpin the performance of machine learning models in materials research. Persistent challenges related to data quality, quantity, and standardization, which critically impact model development and application in materials science and engineering, are also addressed.
Machine learning surrogate models of many-body dispersion interactions in polymer melts
Mar 19, 2025Accurate prediction of many-body dispersion (MBD) interactions is essential for understanding the van der Waals forces that govern the behavior of many complex molecular systems. However, the high computational cost of MBD calculations limits their direct application in large-scale simulations. In this work, we introduce a machine learning surrogate model specifically designed to predict MBD forces in polymer melts, a system that demands accurate MBD description and offers structural advantages for machine learning approaches. Our model is based on a trimmed SchNet architecture that selectively retains the most relevant atomic connections and incorporates trainable radial basis functions for geometric encoding. We validate our surrogate model on datasets from polyethylene, polypropylene, and polyvinyl chloride melts, demonstrating high predictive accuracy and robust generalization across diverse polymer systems. In addition, the model captures key physical features, such as the characteristic decay behavior of MBD interactions, providing valuable insights for optimizing cutoff strategies. Characterized by high computational efficiency, our surrogate model enables practical incorporation of MBD effects into large-scale molecular simulations.
Convolution, aggregation and attention based deep neural networks for accelerating simulations in mechanics
Dec 01, 2022Deep learning surrogate models are being increasingly used in accelerating scientific simulations as a replacement for costly conventional numerical techniques. However, their use remains a significant challenge when dealing with real-world complex examples. In this work, we demonstrate three types of neural network architectures for efficient learning of highly non-linear deformations of solid bodies. The first two architectures are based on the recently proposed CNN U-NET and MAgNET (graph U-NET) frameworks which have shown promising performance for learning on mesh-based data. The third architecture is Perceiver IO, a very recent architecture that belongs to the family of attention-based neural networks--a class that has revolutionised diverse engineering fields and is still unexplored in computational mechanics. We study and compare the performance of all three networks on two benchmark examples, and show their capabilities to accurately predict the non-linear mechanical responses of soft bodies.
MAgNET: A Graph U-Net Architecture for Mesh-Based Simulations
Nov 01, 2022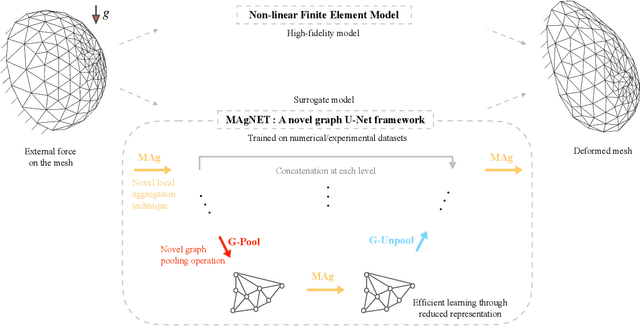
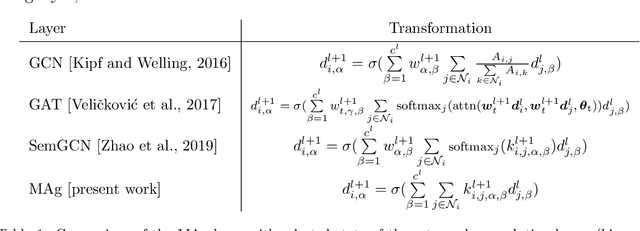
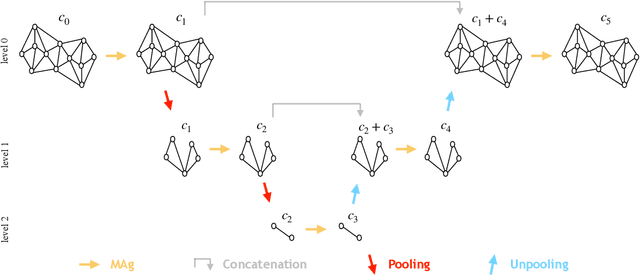

Mesh-based approaches are fundamental to solving physics-based simulations, however, they require significant computational efforts, especially for highly non-linear problems. Deep learning techniques accelerate physics-based simulations, however, they fail to perform efficiently as the size and complexity of the problem increases. Hence in this work, we propose MAgNET: Multi-channel Aggregation Network, a novel geometric deep learning framework for performing supervised learning on mesh-based graph data. MAgNET is based on the proposed MAg (Multichannel Aggregation) operation which generalises the concept of multi-channel local operations in convolutional neural networks to arbitrary non-grid inputs. MAg can efficiently perform non-linear regression mapping for graph-structured data. MAg layers are interleaved with the proposed novel graph pooling operations to constitute a graph U-Net architecture that is robust, handles arbitrary complex meshes and scales efficiently with the size of the problem. Although not limited to the type of discretisation, we showcase the predictive capabilities of MAgNET for several non-linear finite element simulations.
FEM-based Real-Time Simulations of Large Deformations with Probabilistic Deep Learning
Nov 02, 2021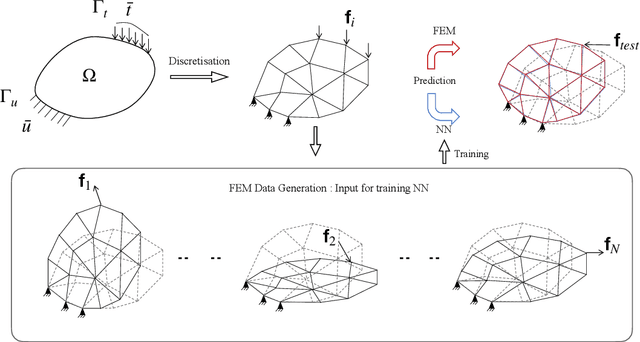

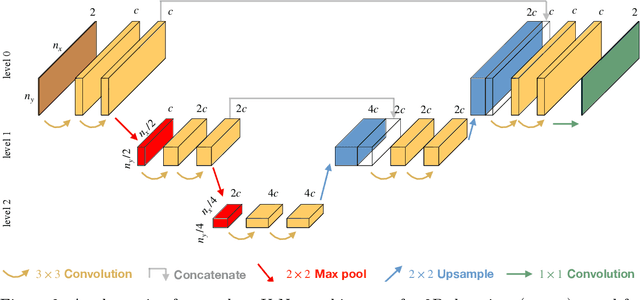

For many engineering applications, such as real-time simulations or control, conventional solution techniques of the underlying nonlinear problems are usually computationally too expensive. In this work, we propose a highly efficient deep-learning surrogate framework that is able to predict the response of hyper-elastic bodies under load. The surrogate model takes the form of special convolutional neural network architecture, so-called U-Net, which is trained with force-displacement data obtained with the finite element method. We propose deterministic- and probabilistic versions of the framework and study it for three benchmark problems. In particular, we check the capabilities of the Maximum Likelihood and the Variational Bayes Inference formulations to assess the confidence intervals of solutions.
Distributed prediction of unsafe reconfiguration scenarios of modular-robotic Programmable Matter
Jun 19, 2020
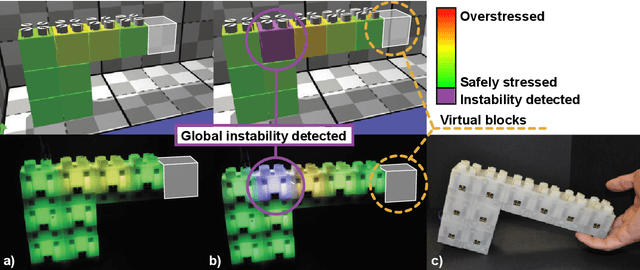

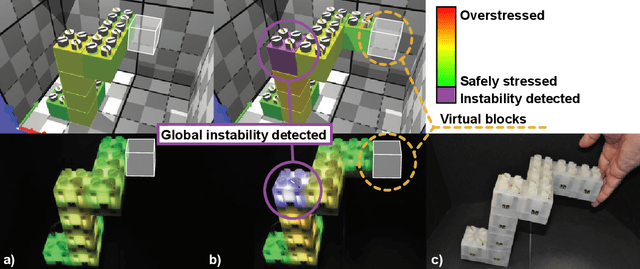
We present a distributed framework for predicting whether a planned reconfiguration step of a modular robot will mechanically overload the structure, causing it to break or lose stability under its own weight. The algorithm is designed to be executed by the modular robot itself and is based on an distributed iterative solution of mechanical equilibrium equations derived from a simplified model of the robot. The model treats inter-modular connections as beams and utilizes a no-sliding unilateral contact law between the modules and the ground. We also provide a simplified algorithm for detecting instability of a rigid robot on flat ground under gravitational loading. The algorithm is verified in simulations using the Programmable Matter simulator VisibleSim, and in real-life experiments using the modular robotic system Blinky Blocks.