 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed prediction of unsafe reconfiguration scenarios of modular-robotic Programmable Matter
Jun 19, 2020
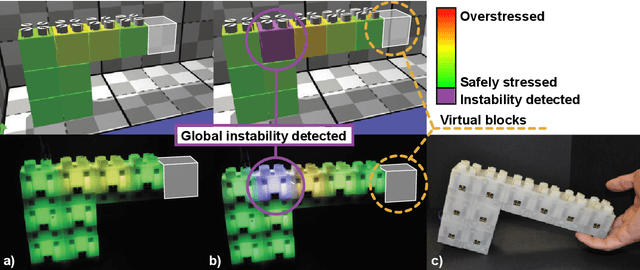

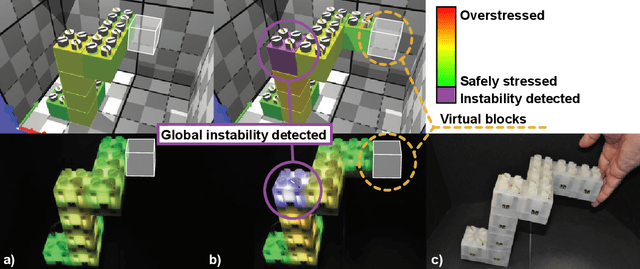
We present a distributed framework for predicting whether a planned reconfiguration step of a modular robot will mechanically overload the structure, causing it to break or lose stability under its own weight. The algorithm is designed to be executed by the modular robot itself and is based on an distributed iterative solution of mechanical equilibrium equations derived from a simplified model of the robot. The model treats inter-modular connections as beams and utilizes a no-sliding unilateral contact law between the modules and the ground. We also provide a simplified algorithm for detecting instability of a rigid robot on flat ground under gravitational loading. The algorithm is verified in simulations using the Programmable Matter simulator VisibleSim, and in real-life experiments using the modular robotic system Blinky Blocks.
Datom: A Deformable modular robot for building self-reconfigurable programmable matter
May 07, 2020



Moving a module in a modular robot is a very complex and error-prone process. Unlike in swarm, in the modular robots we are targeting, the moving module must keep the connection to, at least, one other module. In order to miniaturize each module to few millimeters, we have proposed a design which is using electrostatic actuator. However, this movement is composed of several attachment, detachment creating the movement and each small step can fail causing a module to break the connection. The idea developed in this paper consists in creating a new kind of deformable module allowing a movement which keeps the connection between the moving and the fixed modules. We detail the geometry and the practical constraints during the conception of this new module. We then validate the possibility of movement for a module in an existing configuration. This implies the cooperation of some of the modules placed along the path and we show in simulation that it exists a motion process to reach every free positions of the surface for a given configuration.