 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed prediction of unsafe reconfiguration scenarios of modular-robotic Programmable Matter
Jun 19, 2020
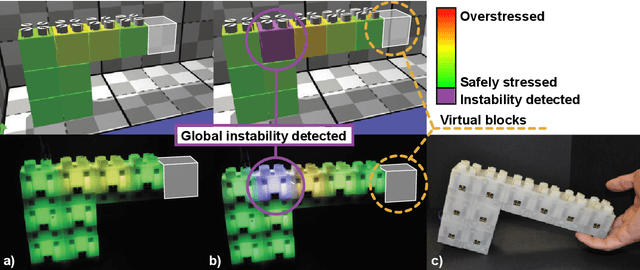

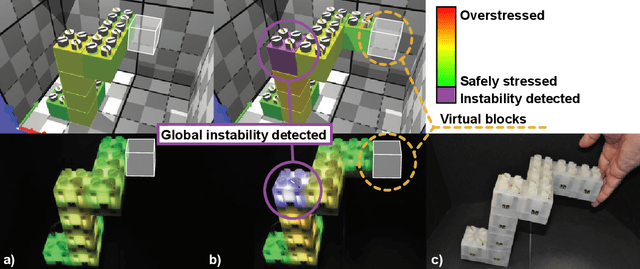
We present a distributed framework for predicting whether a planned reconfiguration step of a modular robot will mechanically overload the structure, causing it to break or lose stability under its own weight. The algorithm is designed to be executed by the modular robot itself and is based on an distributed iterative solution of mechanical equilibrium equations derived from a simplified model of the robot. The model treats inter-modular connections as beams and utilizes a no-sliding unilateral contact law between the modules and the ground. We also provide a simplified algorithm for detecting instability of a rigid robot on flat ground under gravitational loading. The algorithm is verified in simulations using the Programmable Matter simulator VisibleSim, and in real-life experiments using the modular robotic system Blinky Blocks.