 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmotion Concepts and their Function in a Large Language Model
Apr 09, 2026Large language models (LLMs) sometimes appear to exhibit emotional reactions. We investigate why this is the case in Claude Sonnet 4.5 and explore implications for alignment-relevant behavior. We find internal representations of emotion concepts, which encode the broad concept of a particular emotion and generalize across contexts and behaviors it might be linked to. These representations track the operative emotion concept at a given token position in a conversation, activating in accordance with that emotion's relevance to processing the present context and predicting upcoming text. Our key finding is that these representations causally influence the LLM's outputs, including Claude's preferences and its rate of exhibiting misaligned behaviors such as reward hacking, blackmail, and sycophancy. We refer to this phenomenon as the LLM exhibiting functional emotions: patterns of expression and behavior modeled after humans under the influence of an emotion, which are mediated by underlying abstract representations of emotion concepts. Functional emotions may work quite differently from human emotions, and do not imply that LLMs have any subjective experience of emotions, but appear to be important for understanding the model's behavior.
When Models Manipulate Manifolds: The Geometry of a Counting Task
Jan 08, 2026Language models can perceive visual properties of text despite receiving only sequences of tokens-we mechanistically investigate how Claude 3.5 Haiku accomplishes one such task: linebreaking in fixed-width text. We find that character counts are represented on low-dimensional curved manifolds discretized by sparse feature families, analogous to biological place cells. Accurate predictions emerge from a sequence of geometric transformations: token lengths are accumulated into character count manifolds, attention heads twist these manifolds to estimate distance to the line boundary, and the decision to break the line is enabled by arranging estimates orthogonally to create a linear decision boundary. We validate our findings through causal interventions and discover visual illusions--character sequences that hijack the counting mechanism. Our work demonstrates the rich sensory processing of early layers, the intricacy of attention algorithms, and the importance of combining feature-based and geometric views of interpretability.
Policy-shaped prediction: avoiding distractions in model-based reinforcement learning
Dec 08, 2024
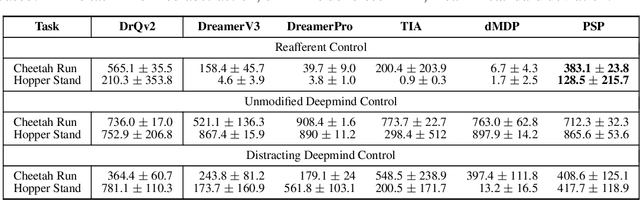


Model-based reinforcement learning (MBRL) is a promising route to sample-efficient policy optimization. However, a known vulnerability of reconstruction-based MBRL consists of scenarios in which detailed aspects of the world are highly predictable, but irrelevant to learning a good policy. Such scenarios can lead the model to exhaust its capacity on meaningless content, at the cost of neglecting important environment dynamics. While existing approaches attempt to solve this problem, we highlight its continuing impact on leading MBRL methods -- including DreamerV3 and DreamerPro -- with a novel environment where background distractions are intricate, predictable, and useless for planning future actions. To address this challenge we develop a method for focusing the capacity of the world model through synergy of a pretrained segmentation model, a task-aware reconstruction loss, and adversarial learning. Our method outperforms a variety of other approaches designed to reduce the impact of distractors, and is an advance towards robust model-based reinforcement learning.
Curious Replay for Model-based Adaptation
Jun 28, 2023Agents must be able to adapt quickly as an environment changes. We find that existing model-based reinforcement learning agents are unable to do this well, in part because of how they use past experiences to train their world model. Here, we present Curious Replay -- a form of prioritized experience replay tailored to model-based agents through use of a curiosity-based priority signal. Agents using Curious Replay exhibit improved performance in an exploration paradigm inspired by animal behavior and on the Crafter benchmark. DreamerV3 with Curious Replay surpasses state-of-the-art performance on Crafter, achieving a mean score of 19.4 that substantially improves on the previous high score of 14.5 by DreamerV3 with uniform replay, while also maintaining similar performance on the Deepmind Control Suite. Code for Curious Replay is available at https://github.com/AutonomousAgentsLab/curiousreplay
Interaction Modeling with Multiplex Attention
Aug 23, 2022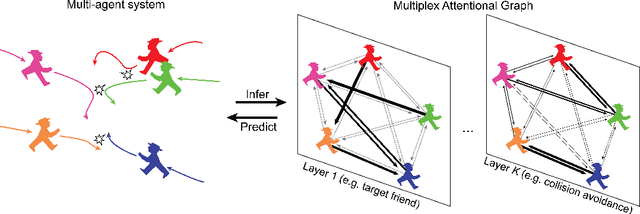
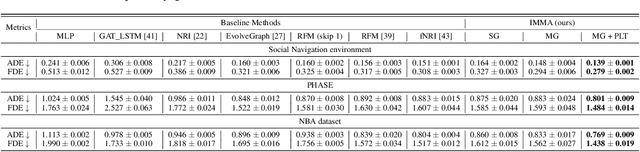
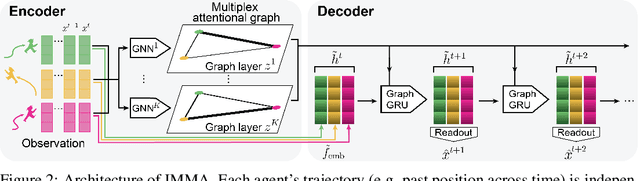
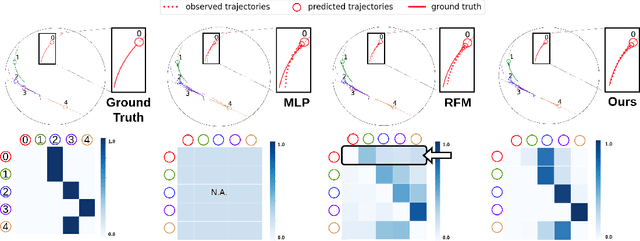
Modeling multi-agent systems requires understanding how agents interact. Such systems are often difficult to model because they can involve a variety of types of interactions that layer together to drive rich social behavioral dynamics. Here we introduce a method for accurately modeling multi-agent systems. We present Interaction Modeling with Multiplex Attention (IMMA), a forward prediction model that uses a multiplex latent graph to represent multiple independent types of interactions and attention to account for relations of different strengths. We also introduce Progressive Layer Training, a training strategy for this architecture. We show that our approach outperforms state-of-the-art models in trajectory forecasting and relation inference, spanning three multi-agent scenarios: social navigation, cooperative task achievement, and team sports. We further demonstrate that our approach can improve zero-shot generalization and allows us to probe how different interactions impact agent behavior.