 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy-shaped prediction: avoiding distractions in model-based reinforcement learning
Paper and Code
Dec 08, 2024
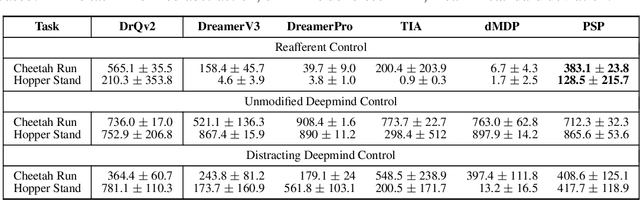


Model-based reinforcement learning (MBRL) is a promising route to sample-efficient policy optimization. However, a known vulnerability of reconstruction-based MBRL consists of scenarios in which detailed aspects of the world are highly predictable, but irrelevant to learning a good policy. Such scenarios can lead the model to exhaust its capacity on meaningless content, at the cost of neglecting important environment dynamics. While existing approaches attempt to solve this problem, we highlight its continuing impact on leading MBRL methods -- including DreamerV3 and DreamerPro -- with a novel environment where background distractions are intricate, predictable, and useless for planning future actions. To address this challenge we develop a method for focusing the capacity of the world model through synergy of a pretrained segmentation model, a task-aware reconstruction loss, and adversarial learning. Our method outperforms a variety of other approaches designed to reduce the impact of distractors, and is an advance towards robust model-based reinforcement learning.