 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTreatment Learning Transformer for Noisy Image Classification
Mar 29, 2022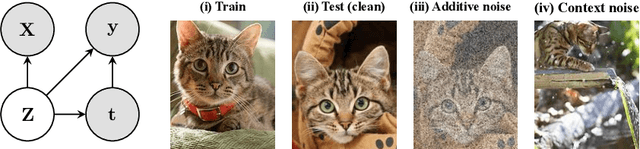
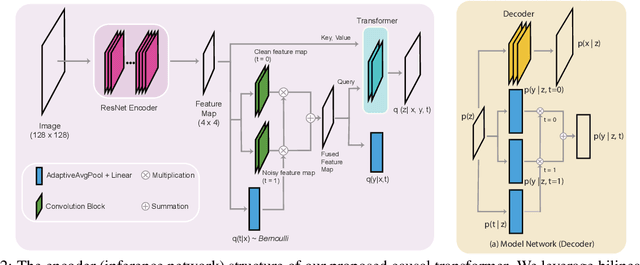
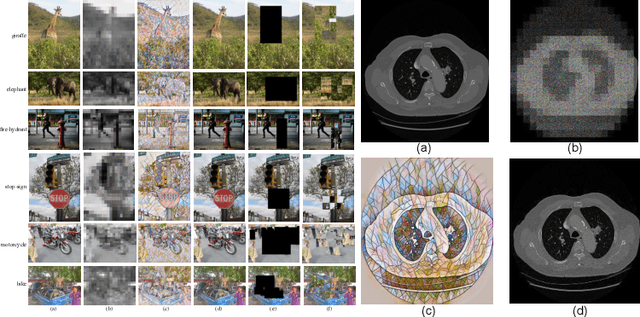

Current top-notch deep learning (DL) based vision models are primarily based on exploring and exploiting the inherent correlations between training data samples and their associated labels. However, a known practical challenge is their degraded performance against "noisy" data, induced by different circumstances such as spurious correlations, irrelevant contexts, domain shift, and adversarial attacks. In this work, we incorporate this binary information of "existence of noise" as treatment into image classification tasks to improve prediction accuracy by jointly estimating their treatment effects. Motivated from causal variational inference, we propose a transformer-based architecture, Treatment Learning Transformer (TLT), that uses a latent generative model to estimate robust feature representations from current observational input for noise image classification. Depending on the estimated noise level (modeled as a binary treatment factor), TLT assigns the corresponding inference network trained by the designed causal loss for prediction. We also create new noisy image datasets incorporating a wide range of noise factors (e.g., object masking, style transfer, and adversarial perturbation) for performance benchmarking. The superior performance of TLT in noisy image classification is further validated by several refutation evaluation metrics. As a by-product, TLT also improves visual salience methods for perceiving noisy images.
Causal Inference Q-Network: Toward Resilient Reinforcement Learning
Feb 18, 2021



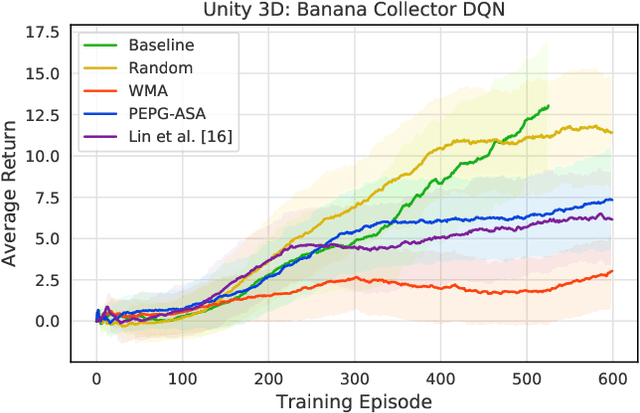
Deep reinforcement learning (DRL) has demonstrated impressive performance in various gaming simulators and real-world applications. In practice, however, a DRL agent may receive faulty observation by abrupt interferences such as black-out, frozen-screen, and adversarial perturbation. How to design a resilient DRL algorithm against these rare but mission-critical and safety-crucial scenarios is an important yet challenging task. In this paper, we consider a resilient DRL framework with observational interferences. Under this framework, we discuss the importance of the causal relation and propose a causal inference based DRL algorithm called causal inference Q-network (CIQ). We evaluate the performance of CIQ in several benchmark DRL environments with different types of interferences. Our experimental results show that the proposed CIQ method could achieve higher performance and more resilience against observational interferences.
Enhanced Adversarial Strategically-Timed Attacks against Deep Reinforcement Learning
Feb 20, 2020

Recent deep neural networks based techniques, especially those equipped with the ability of self-adaptation in the system level such as deep reinforcement learning (DRL), are shown to possess many advantages of optimizing robot learning systems (e.g., autonomous navigation and continuous robot arm control.) However, the learning-based systems and the associated models may be threatened by the risks of intentionally adaptive (e.g., noisy sensor confusion) and adversarial perturbations from real-world scenarios. In this paper, we introduce timing-based adversarial strategies against a DRL-based navigation system by jamming in physical noise patterns on the selected time frames. To study the vulnerability of learning-based navigation systems, we propose two adversarial agent models: one refers to online learning; another one is based on evolutionary learning. Besides, three open-source robot learning and navigation control environments are employed to study the vulnerability under adversarial timing attacks. Our experimental results show that the adversarial timing attacks can lead to a significant performance drop, and also suggest the necessity of enhancing the robustness of robot learning systems.