 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMORDA: A Synthetic Dataset to Facilitate Adaptation of Object Detectors to Unseen Real-target Domain While Preserving Performance on Real-source Domain
Jan 09, 2025



Deep neural network (DNN) based perception models are indispensable in the development of autonomous vehicles (AVs). However, their reliance on large-scale, high-quality data is broadly recognized as a burdensome necessity due to the substantial cost of data acquisition and labeling. Further, the issue is not a one-time concern, as AVs might need a new dataset if they are to be deployed to another region (real-target domain) that the in-hand dataset within the real-source domain cannot incorporate. To mitigate this burden, we propose leveraging synthetic environments as an auxiliary domain where the characteristics of real domains are reproduced. This approach could enable indirect experience about the real-target domain in a time- and cost-effective manner. As a practical demonstration of our methodology, nuScenes and South Korea are employed to represent real-source and real-target domains, respectively. That means we construct digital twins for several regions of South Korea, and the data-acquisition framework of nuScenes is reproduced. Blending the aforementioned components within a simulator allows us to obtain a synthetic-fusion domain in which we forge our novel driving dataset, MORDA: Mixture Of Real-domain characteristics for synthetic-data-assisted Domain Adaptation. To verify the value of synthetic features that MORDA provides in learning about driving environments of South Korea, 2D/3D detectors are trained solely on a combination of nuScenes and MORDA. Afterward, their performance is evaluated on the unforeseen real-world dataset (AI-Hub) collected in South Korea. Our experiments present that MORDA can significantly improve mean Average Precision (mAP) on AI-Hub dataset while that on nuScenes is retained or slightly enhanced.
Improving Diversity of Multiple Trajectory Prediction based on Map-adaptive Lane Loss
Jun 17, 2022
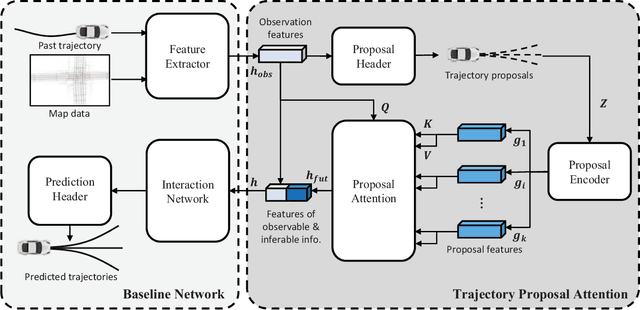
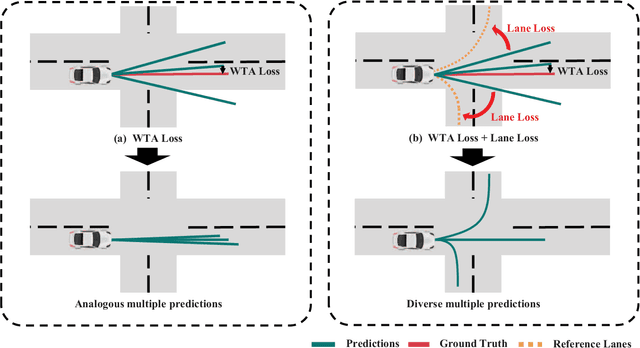

Prior arts in the field of motion predictions for autonomous driving tend to focus on finding a trajectory that is close to the ground truth trajectory. Such problem formulations and approaches, however, frequently lead to loss of diversity and biased trajectory predictions. Therefore, they are unsuitable for real-world autonomous driving where diverse and road-dependent multimodal trajectory predictions are critical for safety. To this end, this study proposes a novel loss function, \textit{Lane Loss}, that ensures map-adaptive diversity and accommodates geometric constraints. A two-stage trajectory prediction architecture with a novel trajectory candidate proposal module, \textit{Trajectory Prediction Attention (TPA)}, is trained with Lane Loss encourages multiple trajectories to be diversely distributed, covering feasible maneuvers in a map-aware manner. Furthermore, considering that the existing trajectory performance metrics are focusing on evaluating the accuracy based on the ground truth future trajectory, a quantitative evaluation metric is also suggested to evaluate the diversity of predicted multiple trajectories. The experiments performed on the Argoverse dataset show that the proposed method significantly improves the diversity of the predicted trajectories without sacrificing the prediction accuracy.
SCALE-Net: Scalable Vehicle Trajectory Prediction Network under Random Number of Interacting Vehicles via Edge-enhanced Graph Convolutional Neural Network
Feb 28, 2020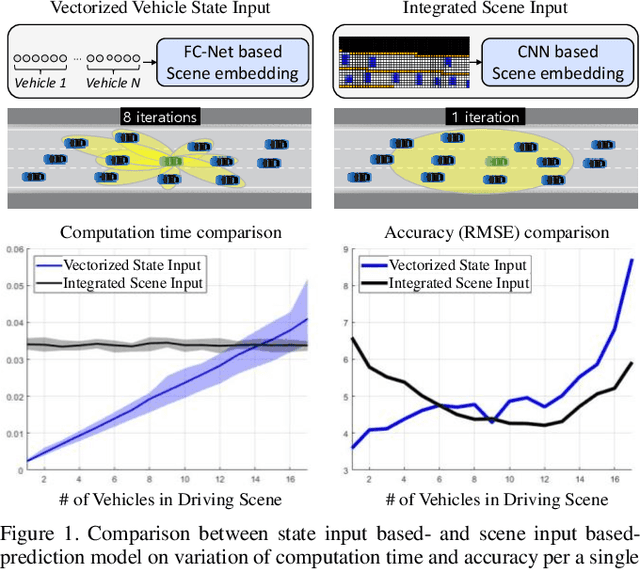

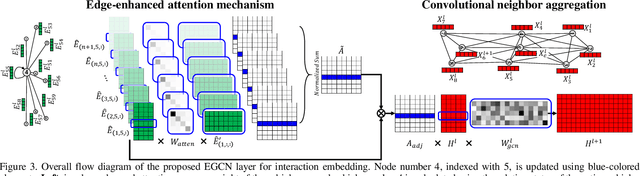
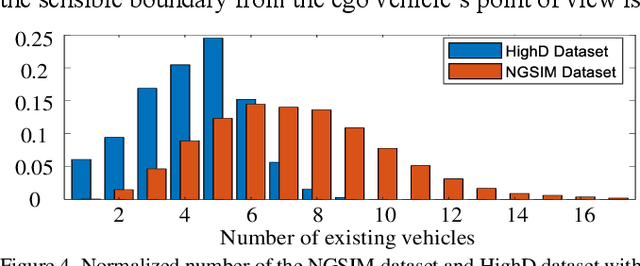
Predicting the future trajectory of surrounding vehicles in a randomly varying traffic level is one of the most challenging problems in developing an autonomous vehicle. Since there is no pre-defined number of interacting vehicles participate in, the prediction network has to be scalable with respect to the vehicle number in order to guarantee the consistency in terms of both accuracy and computational load. In this paper, the first fully scalable trajectory prediction network, SCALE-Net, is proposed that can ensure both higher prediction performance and consistent computational load regardless of the number of surrounding vehicles. The SCALE-Net employs the Edge-enhance Graph Convolutional Neural Network (EGCN) for the inter-vehicular interaction embedding network. Since the proposed EGCN is inherently scalable with respect to the graph node (an agent in this study), the model can be operated independently from the total number of vehicles considered. We evaluated the scalability of the SCALE-Net on the publically available NGSIM datasets by comparing variations on computation time and prediction accuracy per single driving scene with respect to the varying vehicle number. The experimental test shows that both computation time and prediction performance of the SCALE-Net consistently outperform those of previous models regardless of the level of traffic complexities.