 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCALE-Net: Scalable Vehicle Trajectory Prediction Network under Random Number of Interacting Vehicles via Edge-enhanced Graph Convolutional Neural Network
Paper and Code
Feb 28, 2020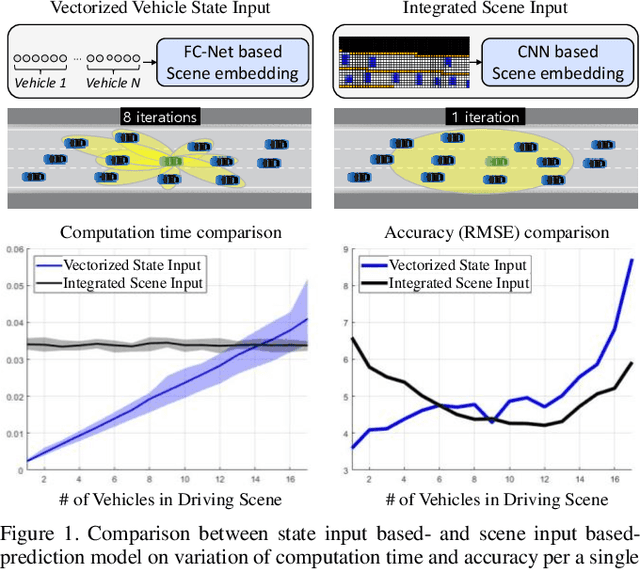

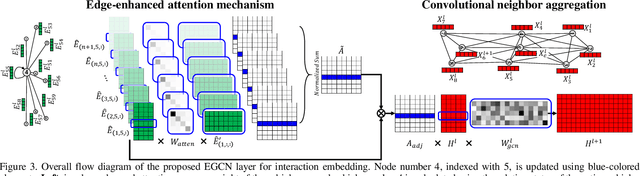
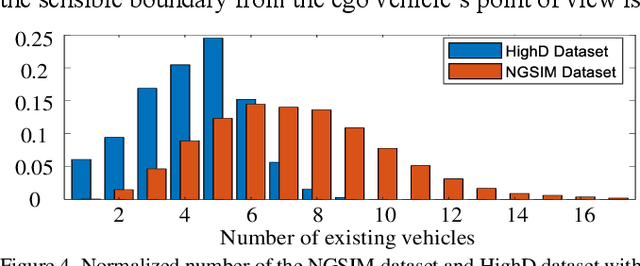
Predicting the future trajectory of surrounding vehicles in a randomly varying traffic level is one of the most challenging problems in developing an autonomous vehicle. Since there is no pre-defined number of interacting vehicles participate in, the prediction network has to be scalable with respect to the vehicle number in order to guarantee the consistency in terms of both accuracy and computational load. In this paper, the first fully scalable trajectory prediction network, SCALE-Net, is proposed that can ensure both higher prediction performance and consistent computational load regardless of the number of surrounding vehicles. The SCALE-Net employs the Edge-enhance Graph Convolutional Neural Network (EGCN) for the inter-vehicular interaction embedding network. Since the proposed EGCN is inherently scalable with respect to the graph node (an agent in this study), the model can be operated independently from the total number of vehicles considered. We evaluated the scalability of the SCALE-Net on the publically available NGSIM datasets by comparing variations on computation time and prediction accuracy per single driving scene with respect to the varying vehicle number. The experimental test shows that both computation time and prediction performance of the SCALE-Net consistently outperform those of previous models regardless of the level of traffic complexities.