 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDS-K3DOM: 3-D Dynamic Occupancy Mapping with Kernel Inference and Dempster-Shafer Evidential Theory
Sep 16, 2022


Occupancy mapping has been widely utilized to represent the surroundings for autonomous robots to perform tasks such as navigation and manipulation. While occupancy mapping in 2-D environments has been well-studied, there have been few approaches suitable for 3-D dynamic occupancy mapping which is essential for aerial robots. This paper presents a novel 3-D dynamic occupancy mapping algorithm called DSK3DOM. We first establish a Bayesian method to sequentially update occupancy maps for a stream of measurements based on the random finite set theory. Then, we approximate it with particles in the Dempster-Shafer domain to enable real time computation. Moreover, the algorithm applies kernel based inference with Dirichlet basic belief assignment to enable dense mapping from sparse measurements. The efficacy of the proposed algorithm is demonstrated through simulations and real experiments.
Distilling a Hierarchical Policy for Planning and Control via Representation and Reinforcement Learning
Nov 16, 2020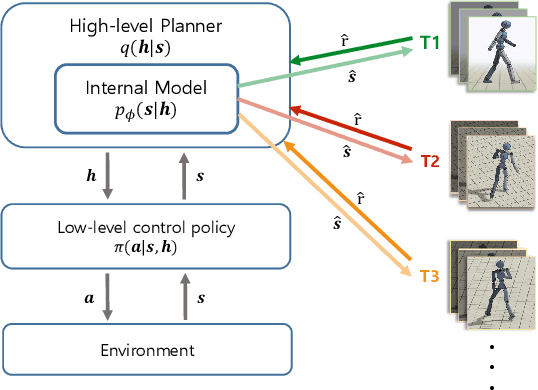
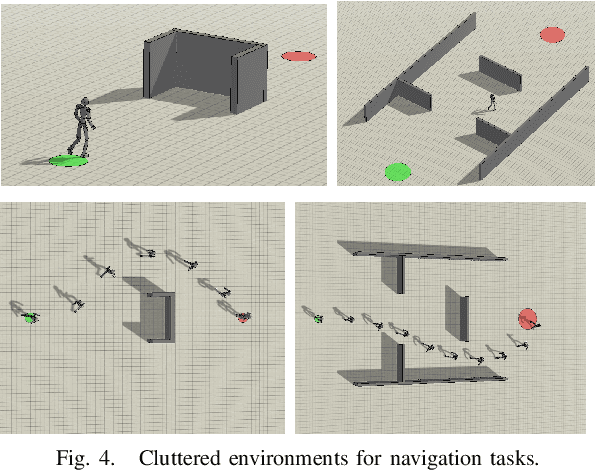
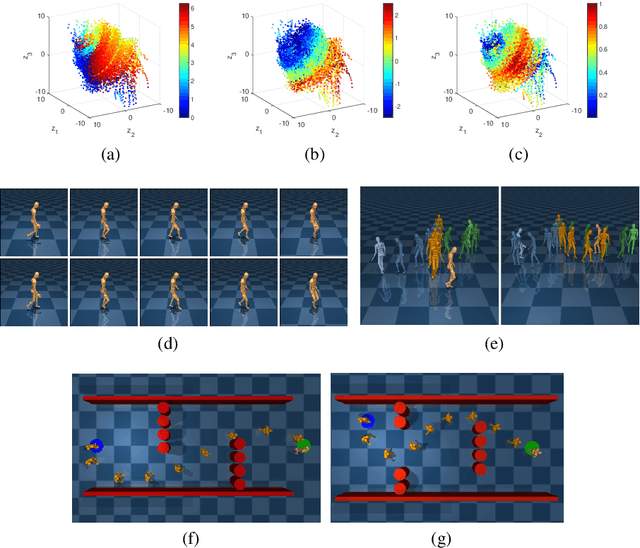
We present a hierarchical planning and control framework that enables an agent to perform various tasks and adapt to a new task flexibly. Rather than learning an individual policy for each particular task, the proposed framework, DISH, distills a hierarchical policy from a set of tasks by representation and reinforcement learning. The framework is based on the idea of latent variable models that represent high-dimensional observations using low-dimensional latent variables. The resulting policy consists of two levels of hierarchy: (i) a planning module that reasons a sequence of latent intentions that would lead to an optimistic future and (ii) a feedback control policy, shared across the tasks, that executes the inferred intention. Because the planning is performed in low-dimensional latent space, the learned policy can immediately be used to solve or adapt to new tasks without additional training. We demonstrate the proposed framework can learn compact representations (3- and 1-dimensional latent states and commands for a humanoid with 197- and 36-dimensional state features and actions) while solving a small number of imitation tasks, and the resulting policy is directly applicable to other types of tasks, i.e., navigation in cluttered environments.
Adaptive Path-Integral Autoencoder: Representation Learning and Planning for Dynamical Systems
Jan 03, 2019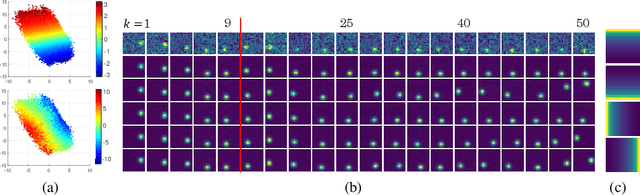
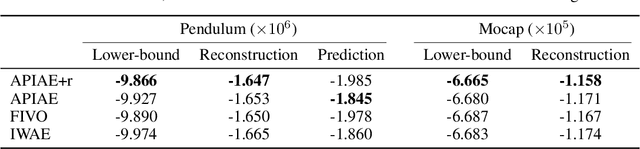
We present a representation learning algorithm that learns a low-dimensional latent dynamical system from high-dimensional \textit{sequential} raw data, e.g., video. The framework builds upon recent advances in amortized inference methods that use both an inference network and a refinement procedure to output samples from a variational distribution given an observation sequence, and takes advantage of the duality between control and inference to approximately solve the intractable inference problem using the path integral control approach. The learned dynamical model can be used to predict and plan the future states; we also present the efficient planning method that exploits the learned low-dimensional latent dynamics. Numerical experiments show that the proposed path-integral control based variational inference method leads to tighter lower bounds in statistical model learning of sequential data. The supplementary video: https://youtu.be/xCp35crUoLQ
Approximate Inference-based Motion Planning by Learning and Exploiting Low-Dimensional Latent Variable Models
Aug 01, 2018



This work presents an efficient framework to generate a motion plan of a robot with high degrees of freedom (e.g., a humanoid robot). High-dimensionality of the robot configuration space often leads to difficulties in utilizing the widely-used motion planning algorithms, since the volume of the decision space increases exponentially with the number of dimensions. To handle complications arising from the large decision space, and to solve a corresponding motion planning problem efficiently, two key concepts are adopted in this work: First, the Gaussian process latent variable model (GP-LVM) is utilized for low-dimensional representation of the original configuration space. Second, an approximate inference algorithm is used, exploiting through the duality between control and estimation, to explore the decision space and to compute a high-quality motion trajectory of the robot. Utilizing the GP-LVM and the duality between control and estimation, we construct a fully probabilistic generative model with which a high-dimensional motion planning problem is transformed into a tractable inference problem. Finally, we compute the motion trajectory via an approximate inference algorithm based on a variant of the particle filter. The resulting motions can be viewed in the supplemental video. ( https://youtu.be/kngEaOR4Esc )
Optimal Control-Based UAV Path Planning with Dynamically-Constrained TSP with Neighborhoods
Dec 18, 2016



This paper addresses path planning of an unmanned aerial vehicle (UAV) with remote sensing capabilities (or wireless communication capabilities). The goal of the path planning is to find a minimum-flight-time closed tour of the UAV visiting all executable areas of given remote sensing and communication tasks; in order to incorporate the nonlinear vehicle dynamics, this problem is regarded as a dynamically-constrained traveling salesman problem with neighborhoods. To obtain a close-to-optimal solution for the path planning in a tractable manner, a sampling-based roadmap algorithm that embeds an optimal control-based path generation process is proposed. The algorithm improves the computational efficiency by reducing numerical computations required for optimizing inefficient local paths, and by extracting additional information from a roadmap of a fixed number of samples. Comparative numerical simulations validate the efficiency of the presented algorithm in reducing computation time and improving the solution quality compared to previous roadmap-based planning methods.