 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow Matching with Uncertainty Quantification and Guidance
Feb 10, 2026Despite the remarkable success of sampling-based generative models such as flow matching, they can still produce samples of inconsistent or degraded quality. To assess sample reliability and generate higher-quality outputs, we propose uncertainty-aware flow matching (UA-Flow), a lightweight extension of flow matching that predicts the velocity field together with heteroscedastic uncertainty. UA-Flow estimates per-sample uncertainty by propagating velocity uncertainty through the flow dynamics. These uncertainty estimates act as a reliability signal for individual samples, and we further use them to steer generation via uncertainty-aware classifier guidance and classifier-free guidance. Experiments on image generation show that UA-Flow produces uncertainty signals more highly correlated with sample fidelity than baseline methods, and that uncertainty-guided sampling further improves generation quality.
SCREP: Scene Coordinate Regression and Evidential Learning-based Perception-Aware Trajectory Generation
Jul 10, 2025Autonomous flight in GPS denied indoor spaces requires trajectories that keep visual localization error tightly bounded across varied missions. Whereas visual inertial odometry (VIO) accumulates drift over time, scene coordinate regression (SCR) yields drift-free, high accuracy absolute pose estimation. We present a perception-aware framework that couples an evidential learning-based SCR pose estimator with a receding horizon trajectory optimizer. The optimizer steers the onboard camera toward pixels whose uncertainty predicts reliable scene coordinates, while a fixed-lag smoother fuses the low rate SCR stream with high rate IMU data to close the perception control loop in real time. In simulation, our planner reduces translation (rotation) mean error by 54% / 15% (40% / 31%) relative to yaw fixed and forward-looking baselines, respectively. Moreover, hardware in the loop experiment validates the feasibility of our proposed framework.
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
Apr 01, 2024



In recent years, Neural Radiance Fields (NeRF) have emerged as a powerful tool for 3D reconstruction and novel view synthesis. However, the computational cost of NeRF rendering and degradation in quality due to the presence of artifacts pose significant challenges for its application in real-time and robust robotic tasks, especially on embedded systems. This paper introduces a novel framework that integrates NeRF-derived localization information with Visual-Inertial Odometry(VIO) to provide a robust solution for robotic navigation in a real-time. By training an absolute pose regression network with augmented image data rendered from a NeRF and quantifying its uncertainty, our approach effectively counters positional drift and enhances system reliability. We also establish a mathematically sound foundation for combining visual inertial navigation with camera localization neural networks, considering uncertainty under a Bayesian framework. Experimental validation in the photorealistic simulation environment demonstrates significant improvements in accuracy compared to a conventional VIO approach.
Computing Forward Reachable Sets for Nonlinear Adaptive Multirotor Controllers
Sep 16, 2022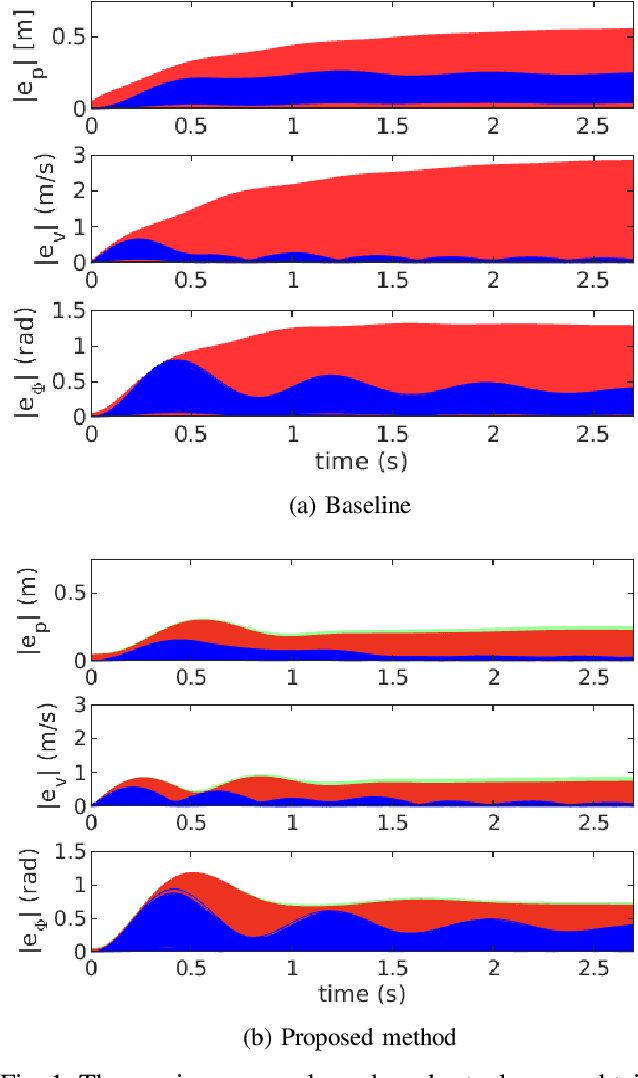
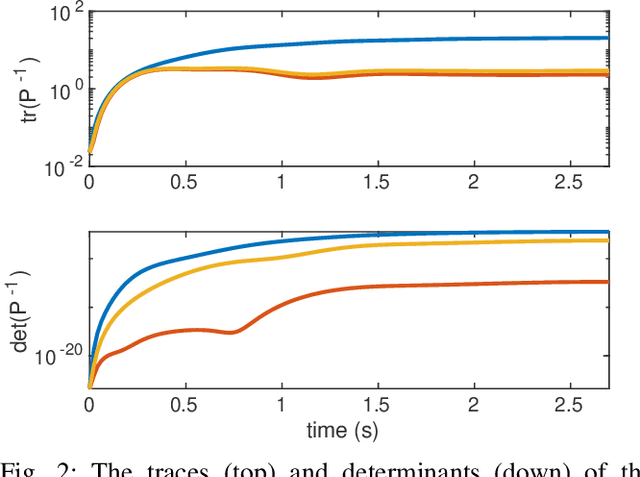
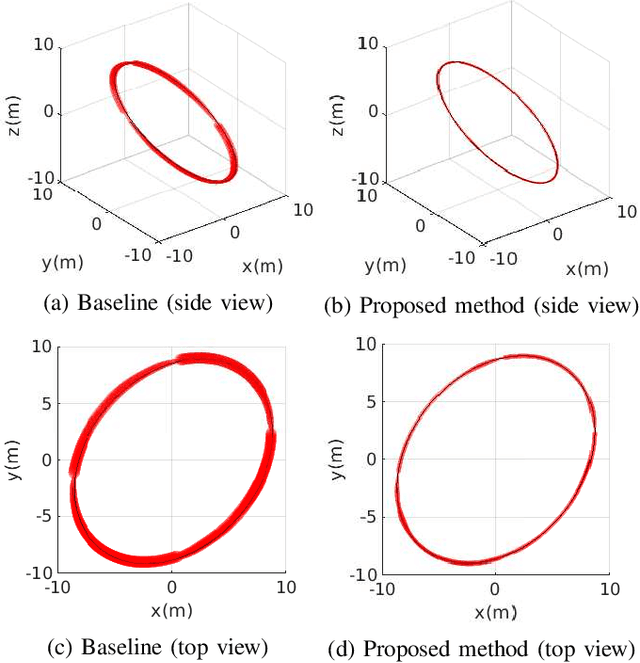
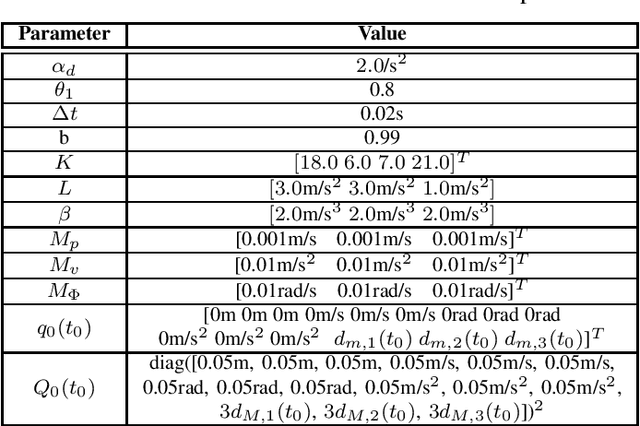
In multirotor systems, guaranteeing safety while considering unknown disturbances is essential for robust trajectory planning. Computing the forward reachable set (FRS), the set of all possible states with bounded disturbances, can be a viable solution to find robust and collision-free trajectories. However, in many cases, the FRS is not calculated in real time and is too conservative to be used in actual applications. In this paper, we mitigate these problems by applying a nonlinear disturbance observer (NDOB) and an adaptive controller to the multirotor system. We formulate the FRS of the closed-loop system combined with the adaptive controller in augmented state space by exploiting the Hamilton-Jacobi reachability analysis and then present the ellipsoidal approximation in a closed-form expression to compute the small FRS in real time. Moreover, tighter disturbance bounds in the prediction horizon are inferred from the NDOB so that a much smaller FRS can be generated. Numerical examples validate the computational efficiency and the smaller scale of the proposed FRS compared to the baseline.
DS-K3DOM: 3-D Dynamic Occupancy Mapping with Kernel Inference and Dempster-Shafer Evidential Theory
Sep 16, 2022


Occupancy mapping has been widely utilized to represent the surroundings for autonomous robots to perform tasks such as navigation and manipulation. While occupancy mapping in 2-D environments has been well-studied, there have been few approaches suitable for 3-D dynamic occupancy mapping which is essential for aerial robots. This paper presents a novel 3-D dynamic occupancy mapping algorithm called DSK3DOM. We first establish a Bayesian method to sequentially update occupancy maps for a stream of measurements based on the random finite set theory. Then, we approximate it with particles in the Dempster-Shafer domain to enable real time computation. Moreover, the algorithm applies kernel based inference with Dirichlet basic belief assignment to enable dense mapping from sparse measurements. The efficacy of the proposed algorithm is demonstrated through simulations and real experiments.