 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing Forward Reachable Sets for Nonlinear Adaptive Multirotor Controllers
Paper and Code
Sep 16, 2022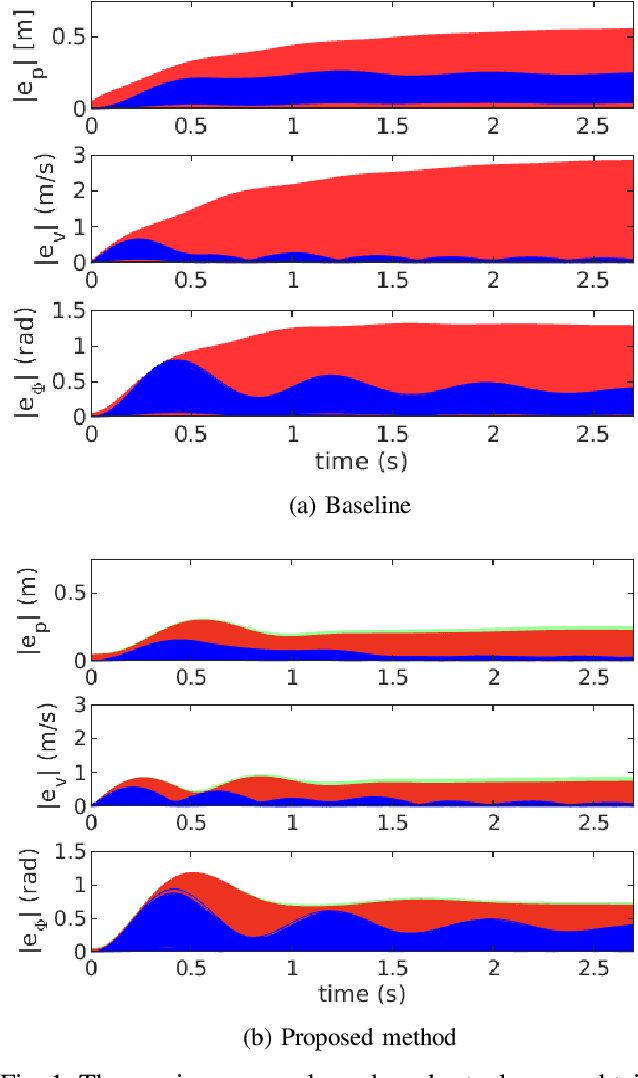
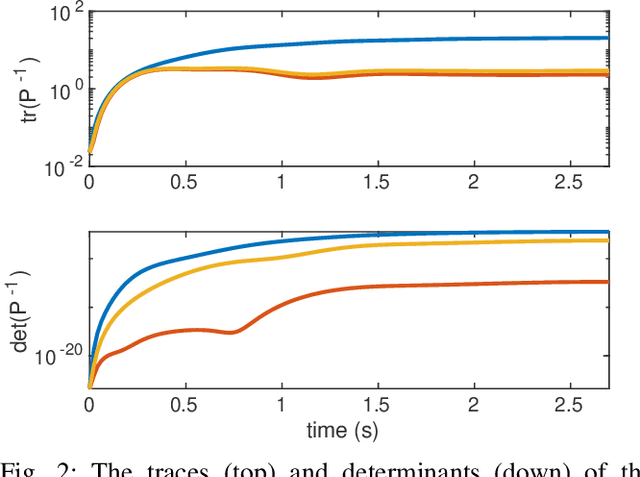
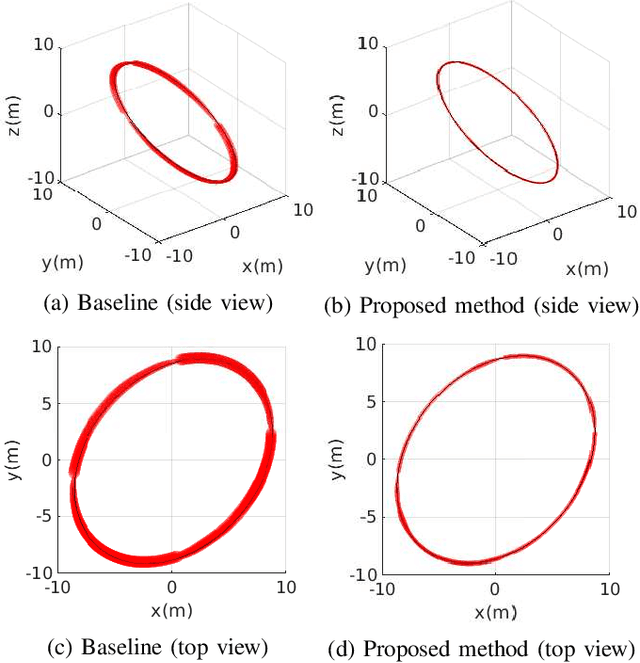
In multirotor systems, guaranteeing safety while considering unknown disturbances is essential for robust trajectory planning. Computing the forward reachable set (FRS), the set of all possible states with bounded disturbances, can be a viable solution to find robust and collision-free trajectories. However, in many cases, the FRS is not calculated in real time and is too conservative to be used in actual applications. In this paper, we mitigate these problems by applying a nonlinear disturbance observer (NDOB) and an adaptive controller to the multirotor system. We formulate the FRS of the closed-loop system combined with the adaptive controller in augmented state space by exploiting the Hamilton-Jacobi reachability analysis and then present the ellipsoidal approximation in a closed-form expression to compute the small FRS in real time. Moreover, tighter disturbance bounds in the prediction horizon are inferred from the NDOB so that a much smaller FRS can be generated. Numerical examples validate the computational efficiency and the smaller scale of the proposed FRS compared to the baseline.