 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling-Based Tour Generation of Arbitrarily Oriented Dubins Sensor Platforms
Aug 09, 2018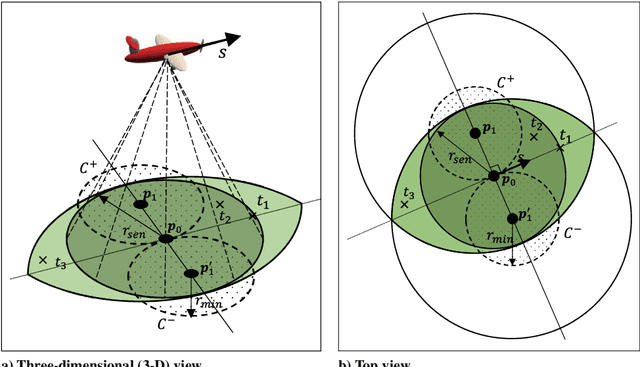
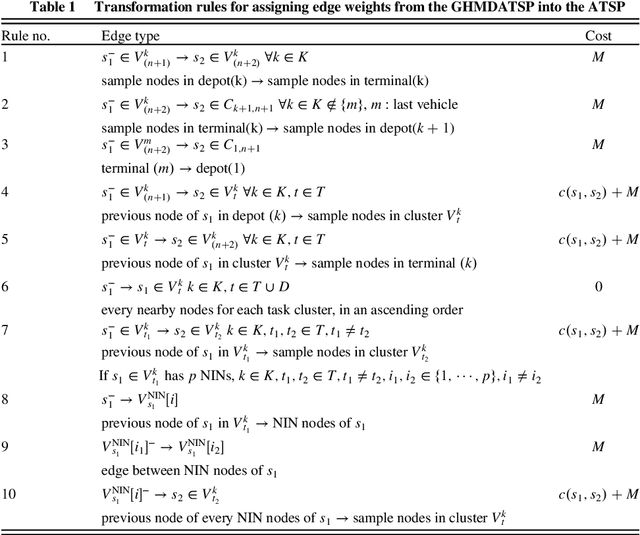
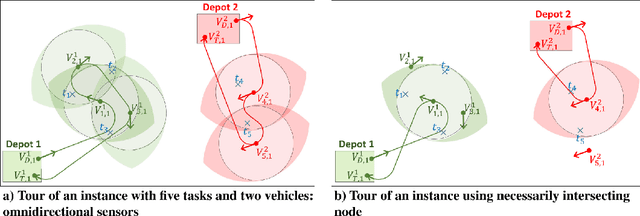
This paper describes a formulation and develops a novel procedure for a fleet of unmanned aerial vehicles (UAVs) from the perspective of remotely executable tasks. In a complex mission environment, the characteristics of vehicles can be different in terms of sensing capability, range, direction, or the motion constraints. The purpose of this paper is to find a set of paths that minimizes the sum of costs while every task region is visited exactly once under certain reasonable assumptions. The heterogeneous multi-UAV path planning problem is formulated as a generalized, heterogeneous, multiple depot traveling salesmen problem (GHMDATSP), which is a variant of the traveling salesman problem. The proposed transformation procedure changes an instance of the GHMDATSP into a format of an Asymmetric, Traveling Salesman Problem (ATSP) to obtain tours for which the total cost of a fleet of vehicles is minimized. The instance of the ATSP is solved using the Lin-Kernighan-Helsgaun heuristic, and the result is inversely transformed to the GHMDATSP-formatted instance to obtain a set of tours. An additional local optimization based path refinement process helps obtain a high-quality solution. Numerical experiments investigate and confirm for the validity and applicability of the proposed procedure.
Optimal Control-Based UAV Path Planning with Dynamically-Constrained TSP with Neighborhoods
Dec 18, 2016



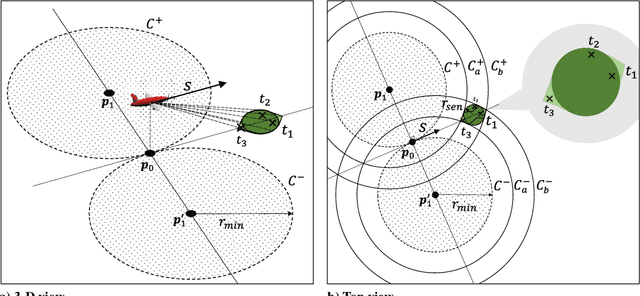
This paper addresses path planning of an unmanned aerial vehicle (UAV) with remote sensing capabilities (or wireless communication capabilities). The goal of the path planning is to find a minimum-flight-time closed tour of the UAV visiting all executable areas of given remote sensing and communication tasks; in order to incorporate the nonlinear vehicle dynamics, this problem is regarded as a dynamically-constrained traveling salesman problem with neighborhoods. To obtain a close-to-optimal solution for the path planning in a tractable manner, a sampling-based roadmap algorithm that embeds an optimal control-based path generation process is proposed. The algorithm improves the computational efficiency by reducing numerical computations required for optimizing inefficient local paths, and by extracting additional information from a roadmap of a fixed number of samples. Comparative numerical simulations validate the efficiency of the presented algorithm in reducing computation time and improving the solution quality compared to previous roadmap-based planning methods.