 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling-Based Tour Generation of Arbitrarily Oriented Dubins Sensor Platforms
Paper and Code
Aug 09, 2018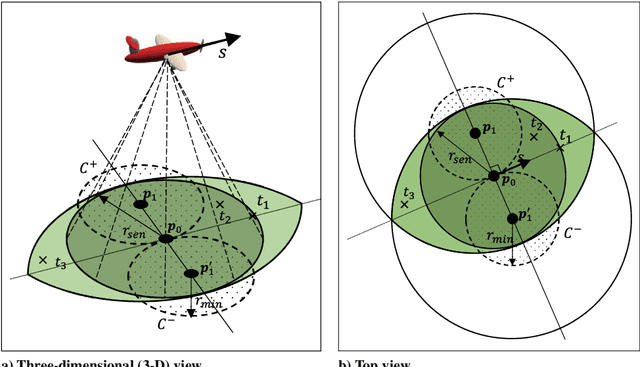
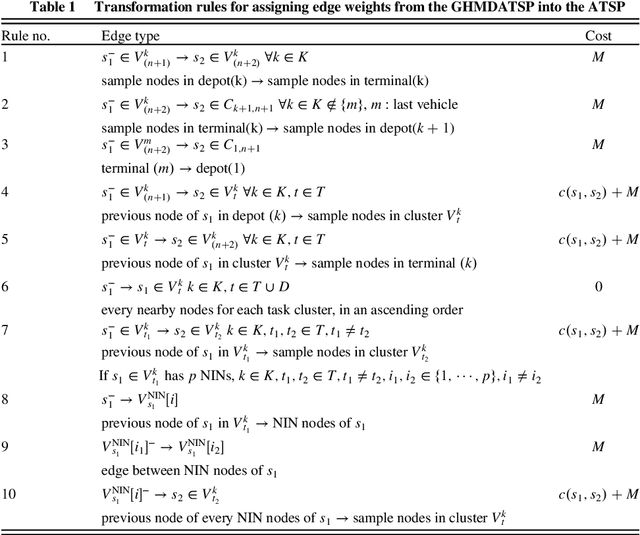
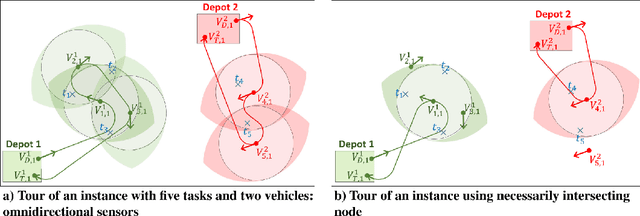
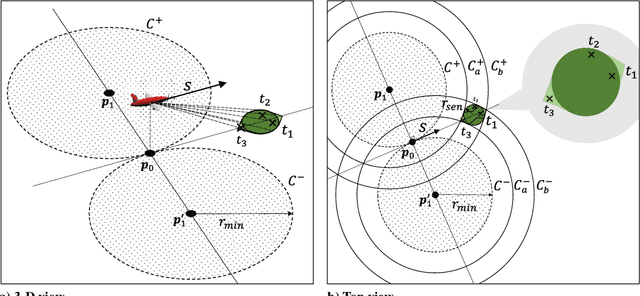
This paper describes a formulation and develops a novel procedure for a fleet of unmanned aerial vehicles (UAVs) from the perspective of remotely executable tasks. In a complex mission environment, the characteristics of vehicles can be different in terms of sensing capability, range, direction, or the motion constraints. The purpose of this paper is to find a set of paths that minimizes the sum of costs while every task region is visited exactly once under certain reasonable assumptions. The heterogeneous multi-UAV path planning problem is formulated as a generalized, heterogeneous, multiple depot traveling salesmen problem (GHMDATSP), which is a variant of the traveling salesman problem. The proposed transformation procedure changes an instance of the GHMDATSP into a format of an Asymmetric, Traveling Salesman Problem (ATSP) to obtain tours for which the total cost of a fleet of vehicles is minimized. The instance of the ATSP is solved using the Lin-Kernighan-Helsgaun heuristic, and the result is inversely transformed to the GHMDATSP-formatted instance to obtain a set of tours. An additional local optimization based path refinement process helps obtain a high-quality solution. Numerical experiments investigate and confirm for the validity and applicability of the proposed procedure.